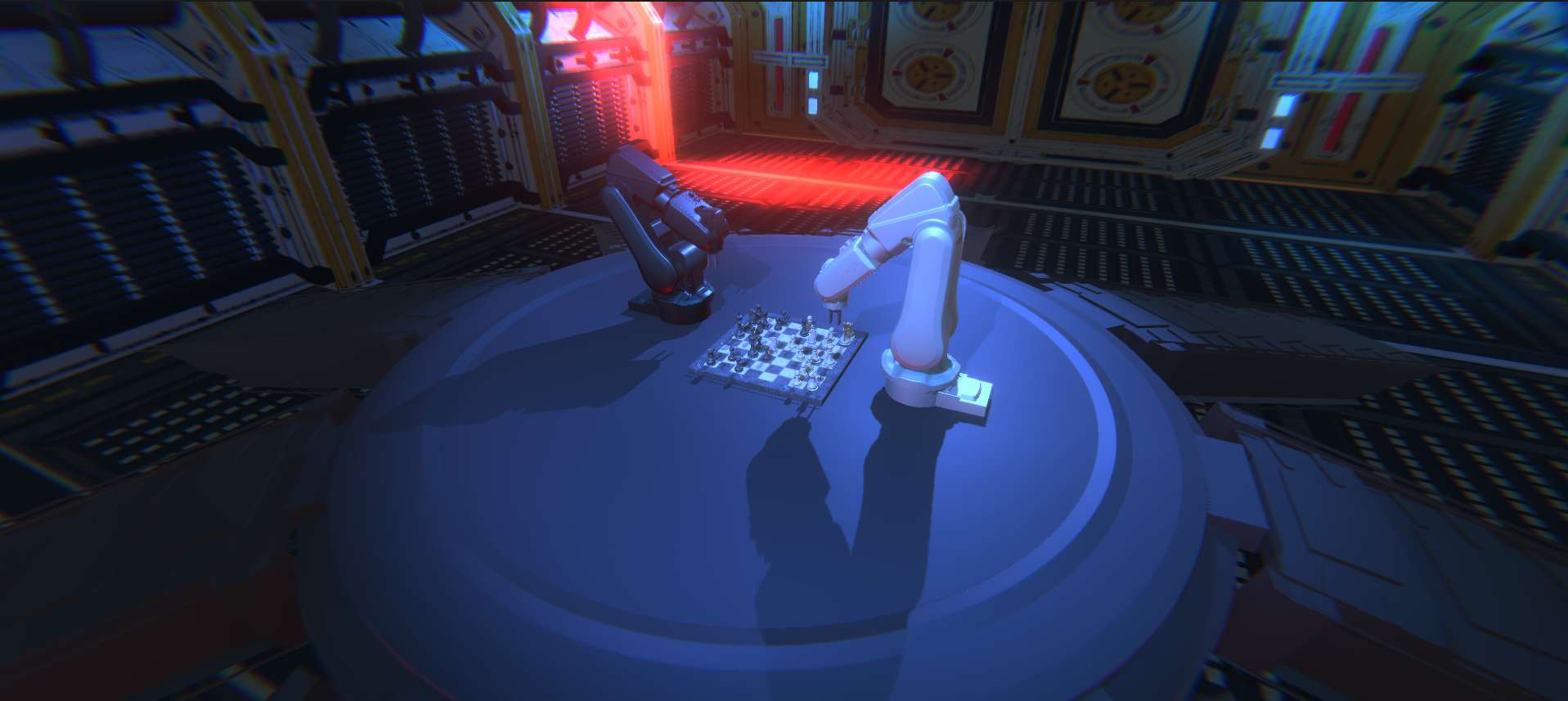
Simulation version of the AutoCHESS system
AutoCHESS simulation was a project with the purpose of proving the concept of using industrial robots for playing chess.
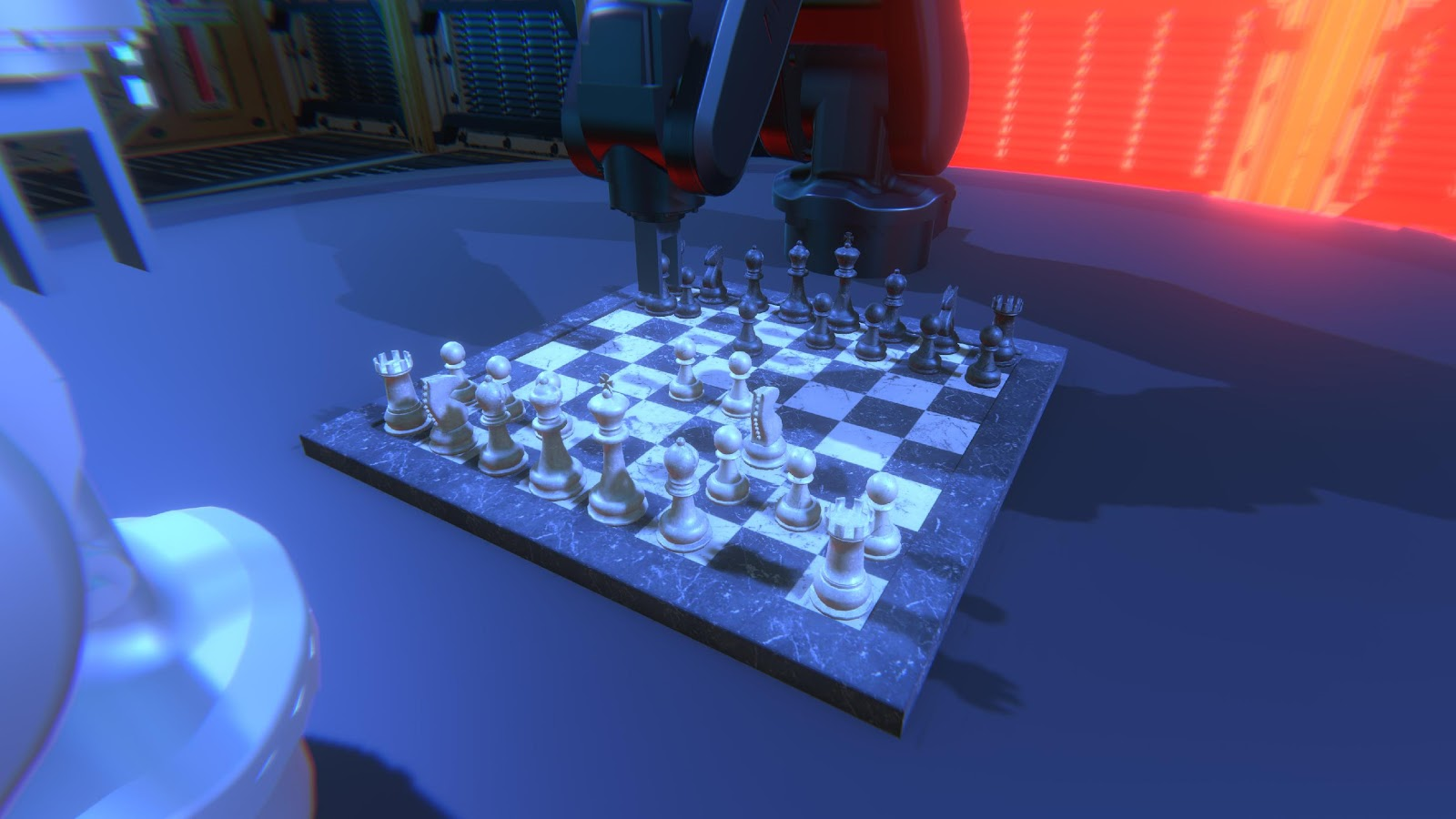
It features two ABB's IRB-120 robot arms playing chess against each other. The robot movements are simulated using the FABRIK inverse kinematics algorithm.
The chess moves are powered by an external Stockfish process, one of the most powerful chess engines currently available.
The project was a part of my Master's study. It had a limited time window to be finished, and due to that, the code and the project weren't cleaned-up and refactored properly.
After starting the build (.exe file) control the camera with the mouse movement and zoom in/out with the scroll wheel