Эксперименты с OpenCV
Структура проекта:
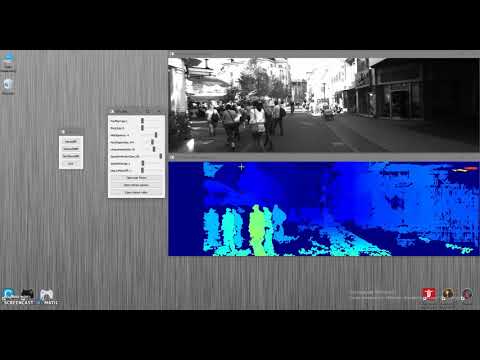
- DepthMapFilter - эксперимент с постфильтрацией карт глубины;
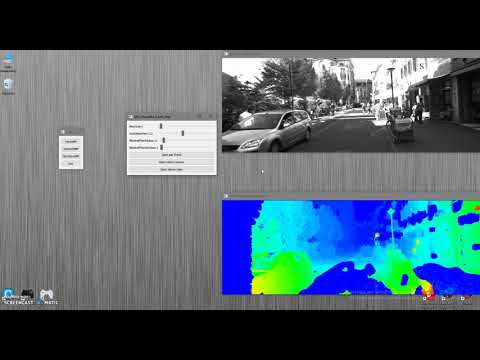
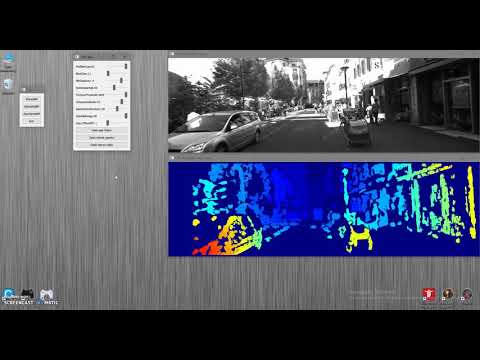
- DisparityMapTuner - эксперимент с различными алгоритмами построения карты глубины (StereoBM, StereoSGBM, GPU StereoBM);
- VideoRecorder - запись видео с камеры в виде набора картинок;
- VideoFromImgs - получение видео файла из набора картинок;
- SlamExperiments - эксперимент с реализацией алгоритма SLAM средставами OpenCV и CUDA;
- CvMatProvider - библиотека получения синхронных откалиброванных кадров со стереокамеры.
Сравнение алгоритмов построения карты глубины
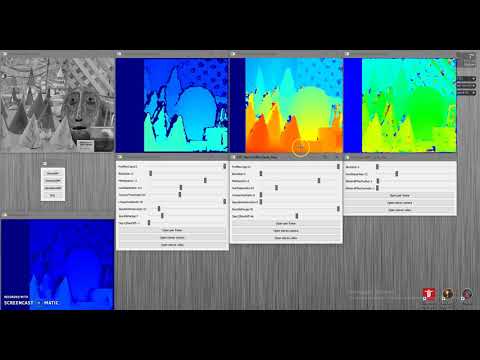
Disparity map StereoSGBM
Disparity map GPU StereoBM
Disparity map StereoBM
- Qt 5;
- OpenCV 3 + CUDA + ximgproc;