Autonomous Period #4
Comments
|
So then after we auto-align the angle, we either vary distance to the goal (drive forward/backward), shooting power, or shooting angle?
Very optimistic. Realistically, 0 to 18. 😉 😋 Team preference should be lining up to the left of the power port, and backing up (easy coding!) after auto. We steal the balls off the blue rendezvous barrier or our trench. Then... skill, practice, and luck. |
|
We do not actually need an encoder to modify the angle. If we mount the camera to the targeting system such that when the targeting system angles, the camera moves with it, a simple position will tell us if we are lined up or not. And come on, if we are being realistic, it is 5-18 points. If we aren't even getting the points for moving off of the line, we didn't do our job properly. Also, our location in regards to the left middle or right with an alliance is entirely random. We could tell the referee beforehand that we had to be on the one side, but after a couple of matches I see the referee getting mighty displeased |
|
When we get the time (i.e. friday or saturday) Add/Change in BallSystem.java public void ballSystemInit() {
currentlyShooting = true; // for autonomous purposes --> see Robot.java changes
}
public boolean currentlyShooting() {
return currentlyShooting;
}
// if we have variable shooting power, this is a modification we can make
public void resetShooter(int distance) {
double power = FUNCTION(distance); // need to create function to determine this
m_shooter.set(power);
}Add/Change in Robot.java @Override
public void autonomousPeriodic() {
// align function
if (aligned)
m_ball.resetShooter();
if (!m_ball.currentlyShooting() && getDistance < 180)
m_drive.arcadeDrive(-1,0); // drive backwards 5 feet ^^^
m_ball.mainMethod();
}
// Add stuff with the LIDAR sensor
// Also put new DIO in constants for thisAdd/Change in Wheel.java public void rotationControl() {
if (!status.equals("Rotation")) {// so we don't reset during rotation control |
|
Eric and Ben suggest doing an align toggle (which I agree with) (or course, this won't be necessary if we can't vision align...) (just part of an ongoing to do list) |
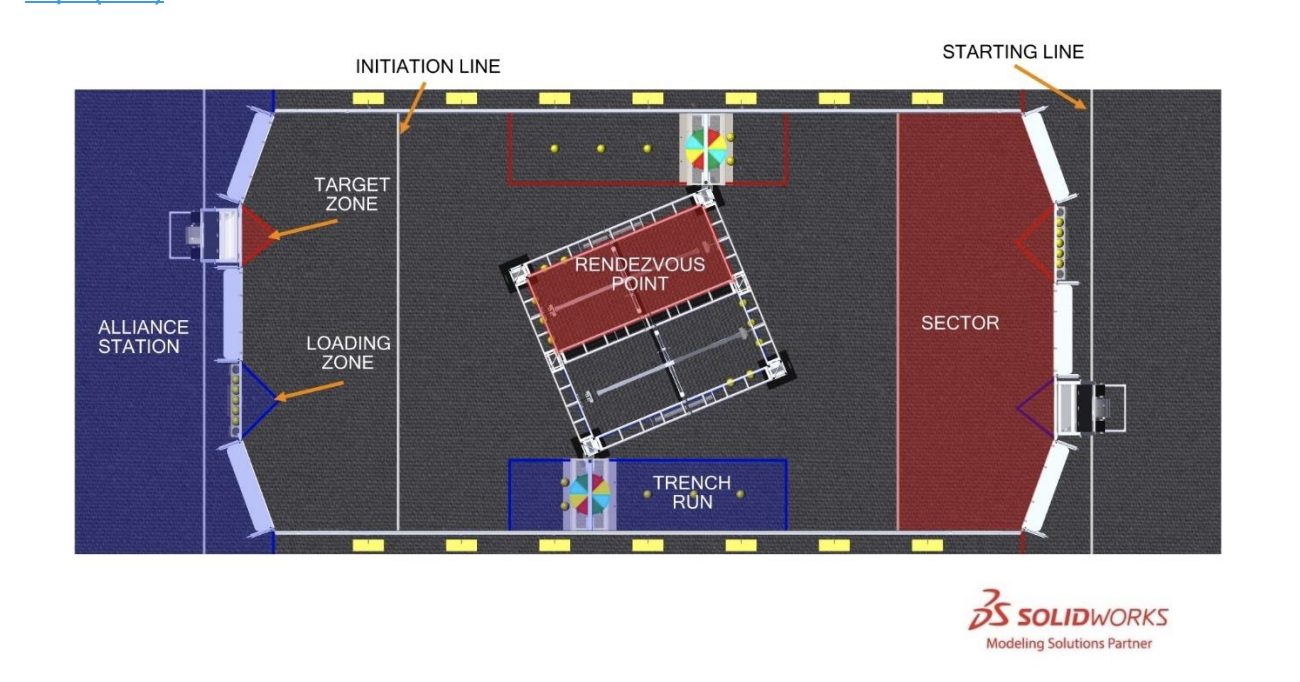
Our Robot will stat somewhere on the initiation line. Rules stateWhich by my understanding means that we can position it wherever we want and at whatever angle we want so long as we maintain the proper order. The Initiation Line is 10 feet from the wall which ideally we will be able to shoot from. By this, we can line the robot best we can before booting up. And once the autonomous period starts, to auto-line up whatever corrective angle we need. After lining up, and shooting (which will gain us somewhere between 12 and 18 points) then all we need to do is move off of the initiation line to gain the 5 points. Arguably it would be best to just move enough to get off the line and not attempt to navigate the field (to not incite tech foul of 15 points or potentially harming alliance robot) We can build two functions one to move forward and one to move back just enough to get off the line and then sit and wait until autonomous is over (only a couple seconds) and then resume play in teleop. limited movement would be ideal in autonomous
The text was updated successfully, but these errors were encountered: