Discuss: other ways to clear mailbox? #57
Comments
That's all there is to sending. This is checking if the send was successful. There are two ways to know if the send was successful without waiting.
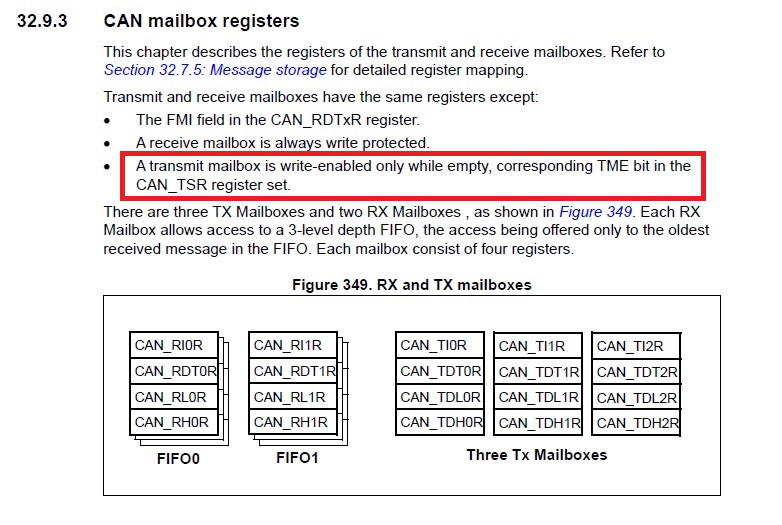
from reference manual
If all three tx mailboxes are pending, whether to cancel the send or wait for the send to complete depends on the requirements of the application. If all 3 tx mailboxes are pending for a long time, there may be an error. We wish you good luck. |

First, love this code, thank you for being so clever and generous with your work.
I'm building a CAN bus stepper controller. Timing is critical for good stepping. Steps have to happen as fast as possible.
From https://github.com/nopnop2002/Arduino-STM32-CAN/blob/master/stm32f407/stm32f407.ino
This is blocking. The stepper still moves... way below expected performance levels. I can shorten the 1M and then I get send failures.
I'm looking for ways to send and receive without blocking. If you have a demo of this I would be very interested!
If I figure out a way myself I'll post back here.
Thank you!
The text was updated successfully, but these errors were encountered: