kinect等基于ToF的相机获取室内点云效果是很好的,但是在室外光照变化的条件下效果不好,因此需要用双目立体视觉匹配的方法。
结构光相机可以覆盖从显微微观到宏观的所有层面,而ToF相机只能覆盖宏观层面。
不对外主动投射光源,案例:ZED、BumbleBee
Kinect v2
Kinect v1、realsense
水平sobel算子
映射函数

1.预处理的图像基于采样的方法得到梯度代价
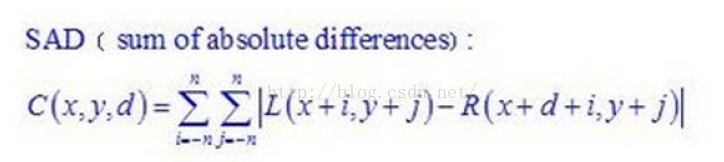
2.原图像基于采样的方法得到SAD代价
然后将两者相加
SAD: Sum of Absolute Difference




1.唯一性检测:对每个像素计算最小代价和次最小代价的值,若两者相对差小于一定阈值,则被剔除。
2.亚像素插值:

3.左右一致性检测(LRC chech,Left-Right Consistency Check):若以左图为参考对象,p点在右图的匹配点为pd;则以右图为参考对象时,点pd在左图的对应匹配点应为点p。若不满足这一约束条件的点则认为是遮挡点或误匹配。
主要参数是 SADWindowSize、numberOfDisparities和uniquenessRatio三个,一般只需对这三个参数进行调整,其余参数按默认设置即可
匹配代价计算(matching cost computation):AD、SAD、NCC、MI(互信息)、CT、RT、BT、AD-Census等。
代价聚合(cost aggregation):扫面线法、动态规划法、SGM中的路径聚合法等。
视差计算(disparity computation):WTA。
视差提炼(disparity refinement):左右一致性检测、亚像素插值、双边滤波、中值滤波。
初始代价计算:AD+Census
代价聚合:基于十字交叉域代价聚合
扫描线优化:(类似于SGM中的代价聚合)
视差优化:离群点检测、迭代局部投票、适当插值、视差非连续区域调整、子像素优化
光照变化、强光反射、透视畸变、弱纹理、重复纹理、遮挡
全卷积网络结构采用双塔式网络结构,去掉全连接层,输入为同一场景对应的两张的图像,输出为视差图。