This is the implementation of Object Detection and Classification module of the paper "Point2Graph: An End-to-end Point Cloud-based 3D Open-Vocabulary Scene Graph for Robot Navigation".
Authors: Yifan Xu, Ziming Luo, Qianwei Wang, Vineet Kamat, Carol Menassa
[2025/02] Our paper is accepted by ICRA2025 🎉🎉🎉
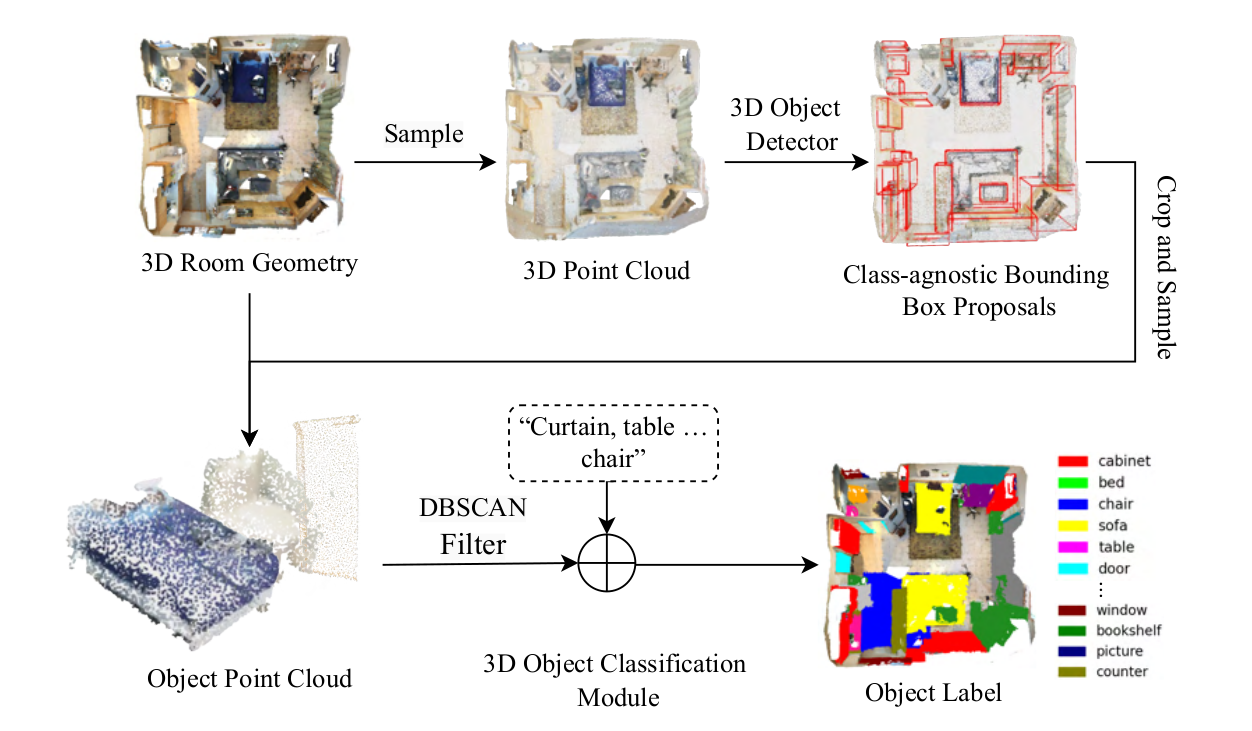
This module consists of two stages: (1) detection and localization using class-agnostic bounding boxes and DBSCAN filtering for object refinement, and (2) classification via cross-modal retrieval, connecting 3D point cloud data with textual descriptions, without requiring annotations or RGB-D alignment.
Step 1. Create a conda environment and activate it.
conda env create -f point2graph.yaml
conda activate point2graphStep 2. install Minkowski Engine.
git clone https://github.com/NVIDIA/MinkowskiEngine.git
cd MinkowskiEngine
python setup.py install --blas_include_dirs=${CONDA_PREFIX}/include --blas=openblasStep 3. install mmcv.
pip install openmim
mim install mmcv-full==1.6.1Step 4. install third party support.
cd third_party/pointnet2/ && python setup.py install --user
cd ../..
cd utils && python cython_compile.py build_ext --inplace
cd ..Scannet Data
- Download ScanNet v2 data HERE. Move/link the
scansfolder such that underscansthere should be folders with names such asscene0001_01. - Open the 'scannet' folder. Extract point clouds and annotations (semantic seg, instance seg etc.) by running
python batch_load_scannet_data.py, which will create a folder namedscannet_train_detection_datahere.
You should
- download the 3D Object Detection pre-trained model V-DETR, and put it in
./models/folder. - download the 3D Object Classification pre-trained model Uni-3D and the clip model, and put them in
./Uni3D/downloads/folder.
The test script is in the run.sh file. Once you have the datasets and model prepared, you can test this models as
bash run.shThe script performs two functions:
- Get a set of point cloud of objects with unknown class and store them at
./results/objects/ - Retrieve and visualize the 3D object point cloud most relevant to the user's query
Point2Graph is built on the V-DETR, and Uni3D.
If you find this code useful in your research, please consider citing:
@misc{xu2024point2graphendtoendpointcloudbased,
title={Point2Graph: An End-to-end Point Cloud-based 3D Open-Vocabulary Scene Graph for Robot Navigation},
author={Yifan Xu and Ziming Luo and Qianwei Wang and Vineet Kamat and Carol Menassa},
year={2024},
eprint={2409.10350},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2409.10350},
}