





{kind=link}
{kind=link}
Progetto inizialmente portato avanti nell'ambito del corso di Controlli Automatici tenuto a Tor-Vergata nell'anno 2019
- Sviluppato da studenti del 3° Ing. Informatica
- Corso tenuto dal Professor: Daniele Carnevale
I componenti del gruppo originario erano:
- Emanuele Alfano
- Davide Antonini
- Del Papa Nicolò
- Francesco Ferrò
- Ilaria Angeloni
- Alberto Menichelli
Il progetto è attualmente portato avanti da Emanuele Alfano con la licenza GPLv3
Per poter avere i sorgenti sul proprio computer, basterà usare git da terminale per clonare il Repository sulla propria macchina: A questo punto, compiliamo i sorgenti e installiamoli dentro /usr/local/bin
sudo apt install git # Per poter scaricare i sorgenti
cd ~/Documents # Directory di salvataggio dei sorgenti
git clone https://github.com/Alfystar/Scorbot-CA.git
Per vedere i sorgenti e relative guide di Compilazione andare Qui
Per la realizzazione della documentazione del software si è usata la versione Comunity di Visual Paradigm. Le classi non sono state documentate tutte al massimo dettaglio, mettendo invece enfasi sull'interconnessione, i pattern e la gerarchia delle classi presente. er i dettagli implementativi il codice
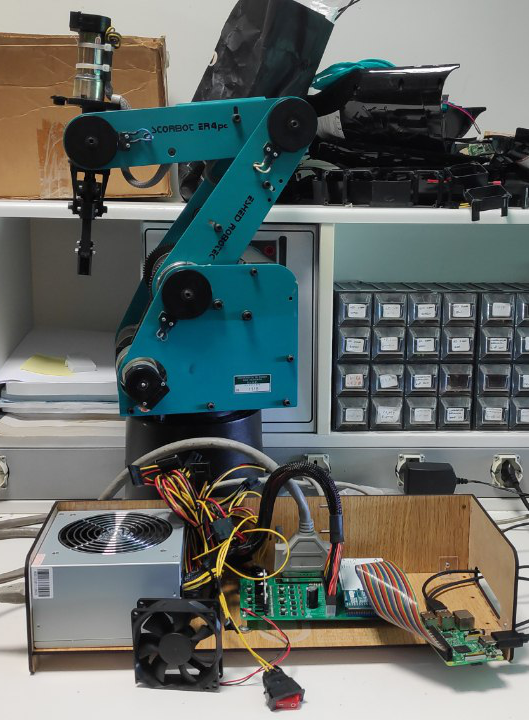
La scheda di controllo dello Scorbot è pensata per essere un ponte tra la meccanica del robot, e il sistema di controllo integrato all'interno di un computer Linux.

Il manuale di questo sotto sistema è trovabile qui.
There are 2 version of the board. Each one have his firmware and his library. They are drawing using EAGLE 9.4.2 Educetional. View this project on CADLAB.io.
In questa prima versione si sono utilizzati dei ponti H L298, e per leggere gli ACS712. La scheda soffriva di vari problemi di connessioni tra i pin in fase di progetto, le quali sono tutte risolvibili a mano. La scheda possiede un firmware di controllo che parla al Rapsberry Py per mezzo di una comunicazione SPI. Di questa prima vesione è stata scritta una presentazione del progetto ai fini dell'esame.
In questa seconda scheda il cambio più evidente è nel driver motori che adesso è diventato un VNH5019, il quale ha integrato dentro una misura di corrente già scalata e non necessita di letture esterne, di questa scheda è presente anche un Manuale., che descrive nel dettaglio i vari punti del progetto.
Top Face

 Bottom Face
Bottom Face
La scheda comunica con un computer mediante collegamento UART, qui è stata sviluppata una libreria per la comunicazione con un processo Linux (testata su Mint e KDE NEON, in generale ubunto based)
Per controllare il Robot in maniera intuitiva si è pensato di usare un interfaccia grafica scritta in QT5, la quale permette di controllare il robot sia direttamente che per mezzo di un PID
Main Window

Uart Select

Setting Board Window

Free Move Window

Per graficare i dati ricevuti è stata usata la libreria qcustomplot