Robot football simulator application with physically correct game simulation, different game scenario and game rules, rich settings and customization features and with C API to develop and run algorithms, required to control robots, test various game strategies and game mechanics.
- Simulated 2d physics of the game
- Optimized 2d rendering for the football game
- Game scenario for different game setup
- Game rules to control game flow
- Plugin system for user-defined algorithms loading at runtime
- GUI application
- Settings to tweak simulation and display options
- Debug window with current simulation state info
- Example Algorithms
- Config file support
- macOS (tested on Mojave)
- Linux based OS (tested on Ubuntu 20.04)
- Windows (tested on 10)
- glfw for cross-platform window and input management
- glew for OpenGL functions and extensions loading
- box2d for 2d robots physics simulation
- imgui for creating application GUI
- stb image for images processing
- dynalo for shared/dynamics libraries management
- picojson for json configs loading
- glm for 3d math functions
The project uses cross-platform windowing and input management library glfw.
This library uses native windowing APIs and built-in OS window frameworks,
however it may require additional setup step for linux users. Follow the official
glfw guide to setup this dependencies by apt-get tool.
Get the source code and initialize dependencies of the project.
$ git clone https://github.com/EgorOrachyov/RobotFootballSim.git
$ cd RobotFootballSim
$ git submodule update --init --recursiveConfigure build directory and run the build process.
$ mkdir build
$ cd build
$ cmake ..
$ cmake --build .Pass
-j Noption in the last cmake command to issue build on N threads.
Alternatively import project into desired IDE (import as cmake project).
In order to start the simulator
rfsimtarget, you will have to build all default algorithm plugins targetsrandommoveandfollowmove. As soon as its done, you will be able to correctly start the simulator application.
Inside the build directory go into directory with actual rfsim executable
(on linux/macos it will be placed in build/rfsim, on windows some generators
can output the actual executable into build/Debug/rfsim and something similar):
$ ./rfsimThis command starts simulator application, so the app primary window must appear on the screen.
Simulator uses config.json to tweak simulator params, which are parsed and applied on application start-up.
This config file is placed near rfsim executable inside build directory in time of cmake build process.
Use this config file to customize the following params:
- windowWidth Primary window width in universal units ADVANCED
- windowHeight Primary window height in universal units ADVANCED
- fontScale Font scale for hdpi displays
- guiScale GUI elements scale for hdpi displays ADVANCED
- resourcesPath Prefix path to simulator resources ADVANCED
- pluginPathPrefix Prefix path to algorithms plugins ADVANCED
- pluginPaths Actual plugins names to load on start-up (use name without
libandextspecifiers)
macOS: Tweak fontScale and set it to 1.0 or less on high-resolution Retina displays. Windowing library glfw and imgui automatically scales font and window size on this platform, so explicit scaling is not required.
In order to create custom algorithm you need to create a shared/dynamic library object
and expose API conventions functions, which will be called by the simulator for each simulation step.
The API is described in include/rfsim/rfsim.h header file. The template of the basic algorithm is following:
#define RFSIM_EXPORTS
#include <rfsim/rfsim.h>
#include <cstring>
RFSIM_DEFINE_FUNCTION_INIT {
std::strcpy(context->name, "Algorithm Template");
std::strcpy(context->description, "Default algorithm template for readme");
return rfsim_status_success;
};
RFSIM_DEFINE_FUNCTION_BEGIN_GAME {
return rfsim_status_success;
};
RFSIM_DEFINE_FUNCTION_TICK_GAME {
return rfsim_status_success;
};
RFSIM_DEFINE_FUNCTION_END_GAME {
return rfsim_status_success;
};
RFSIM_DEFINE_FUNCTION_FINALIZE {
return rfsim_status_success;
};This algorithm does actually nothing. However, it provides five callback functions, which will be called for each simulation step. Description of the functions:
rfsim_status rfsim_init(rfsim_algo_state* context)- called when the algorithm is loaded into the simulatorrfsim_status rfsim_begin_game(rfsim_algo_state* context, const rfsim_game_settings* settings, const rfsim_game_start_info* start)- called when new game is startedrfsim_status rfsim_tick_game(rfsim_algo_state* context, rfsim_game_state_info* state)- called each sim steprfsim_status rfsim_end_game(rfsim_algo_state* context)- called when game is finishedrfsim_status rfsim_finalize(rfsim_algo_state* context)- called when algorithm is unloaded from simulator
Follow rfsim.h and some example algorithms implementations to create your custom algo.
-
Simulator uses 2d coordinates space with horizontal from left to right X-axis, and vertical from top to bottom Y-axis. Rotations are encoded in radians, full rotation is 2 * PI respectively. By default the body (robot) direction vector is
(1, 0)and its angle is0.0f. The rotation has clockwise order, so the body with anglePI / 4has direction vector (0.707, 0.707). More info is shown on the image: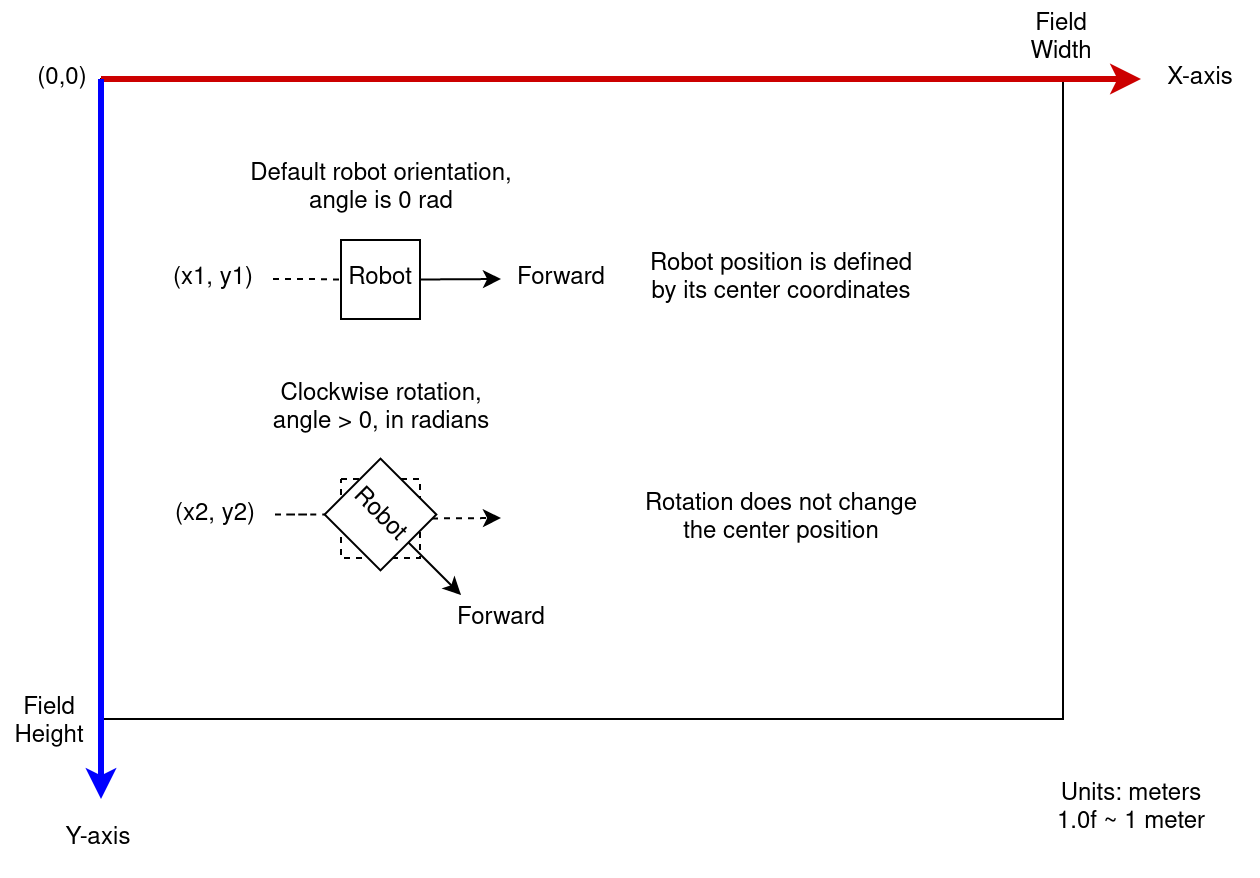
-
For measurements simulator uses the metric system of measures and weights. Robots and ball mass is in kilograms, speed is in meter/second, force is in Newtons, time in seconds and etc. Physics properties of the field, robots and ball, friction and restitution are set in the
physics/PhysicsGameProperties.hppstructure. This properties are custom for each game and can be found in thescenarion/ScenarionCommon.hppclass. Physics settings are listed bellow:
- fieldFriction field friction for bodies
- robotRadius in meters
- robotHeight in meters
- robotMass in kilograms
- robotFriction robot material friction
- robotRestitution robot restitution for contacts
- robotMaxSpeed in meters/second
- robotWheelXOffset offset in meters from the center of the robot where wheels are placed
- ballRadius in meters
- ballMass in kilograms
- ballFriction ball material friction
- ballRestitution ball restitution for contacts
-
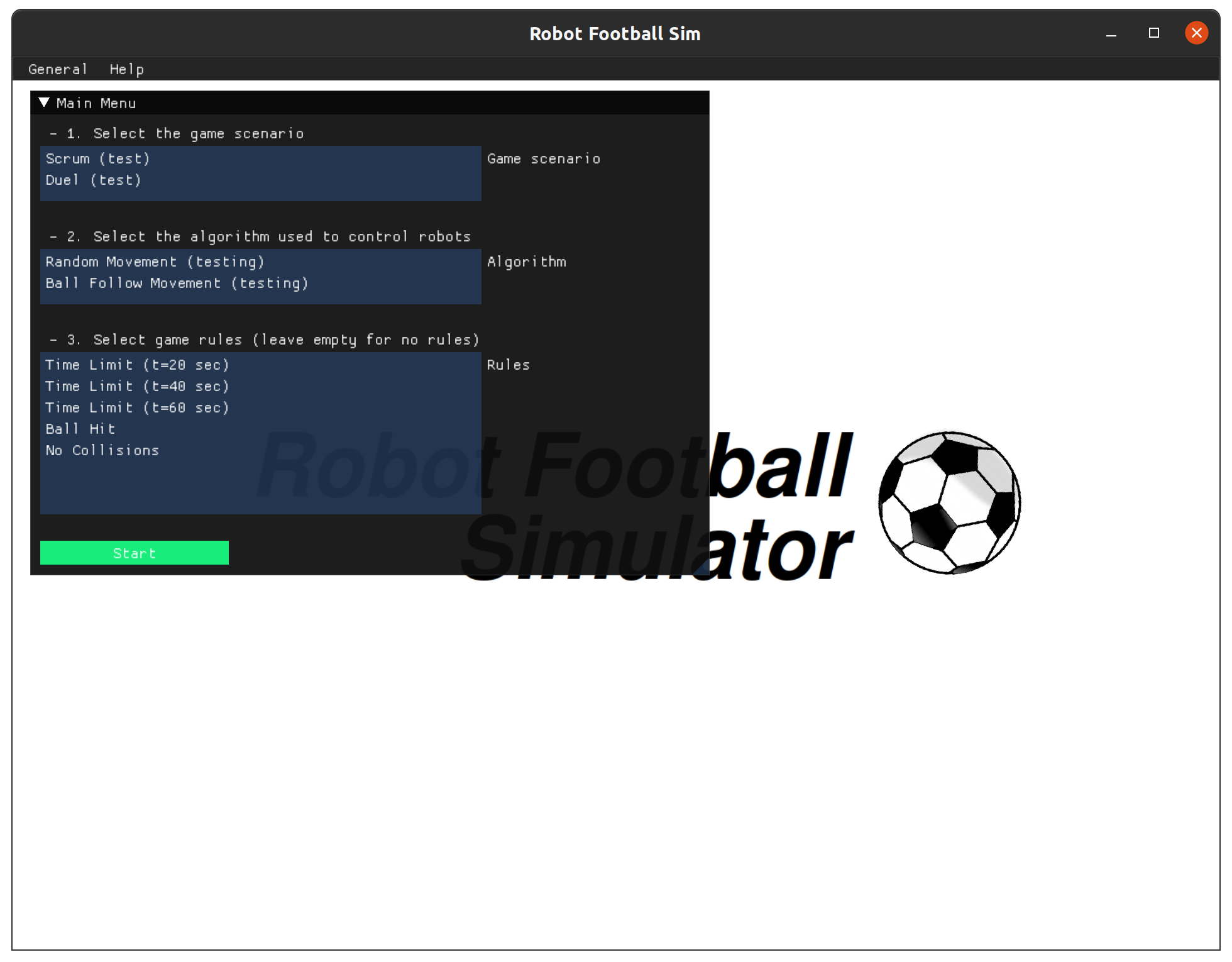
Main menu screen animated logo and menu to start new game with selected scenario, control algorithm and game rules.
-
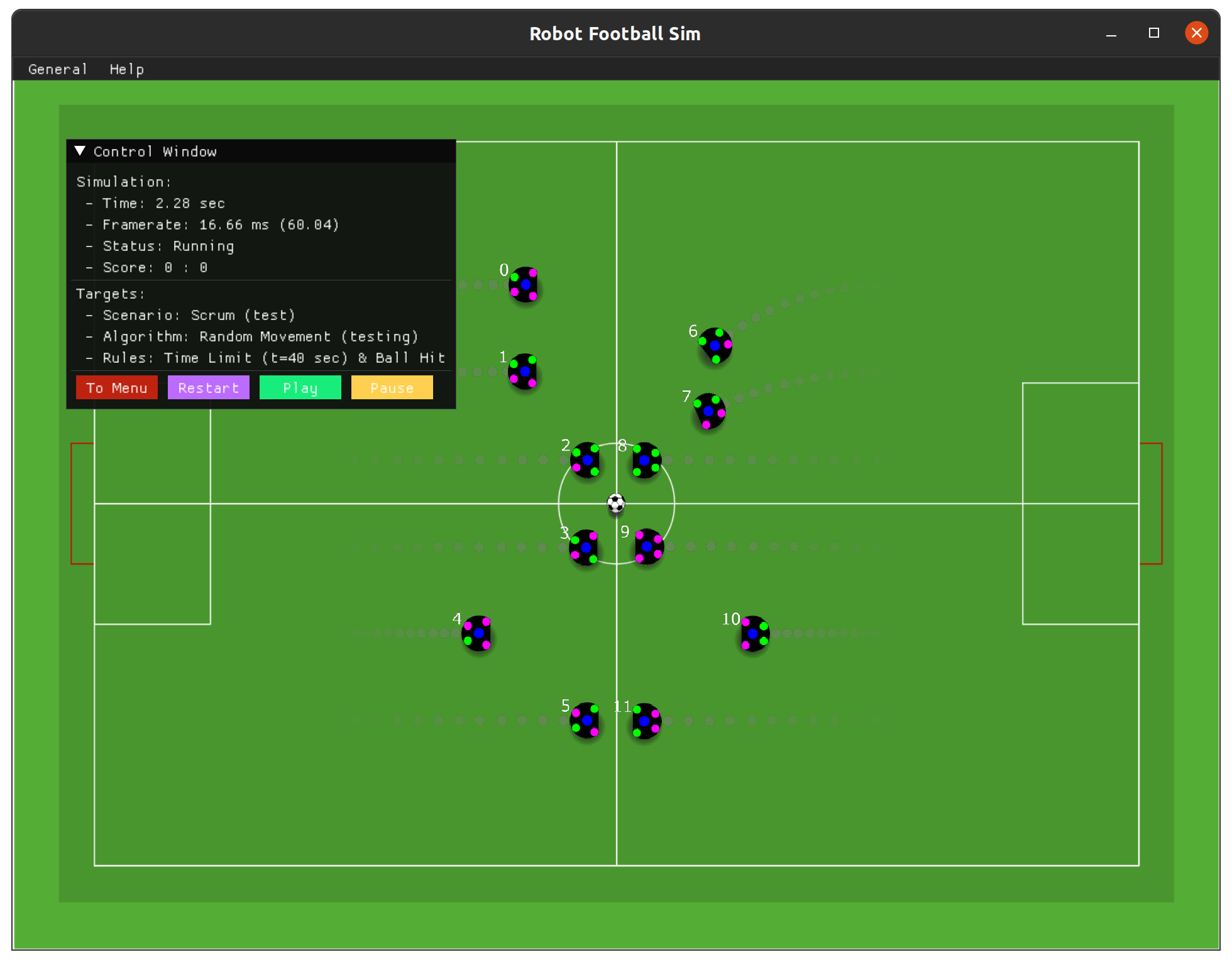
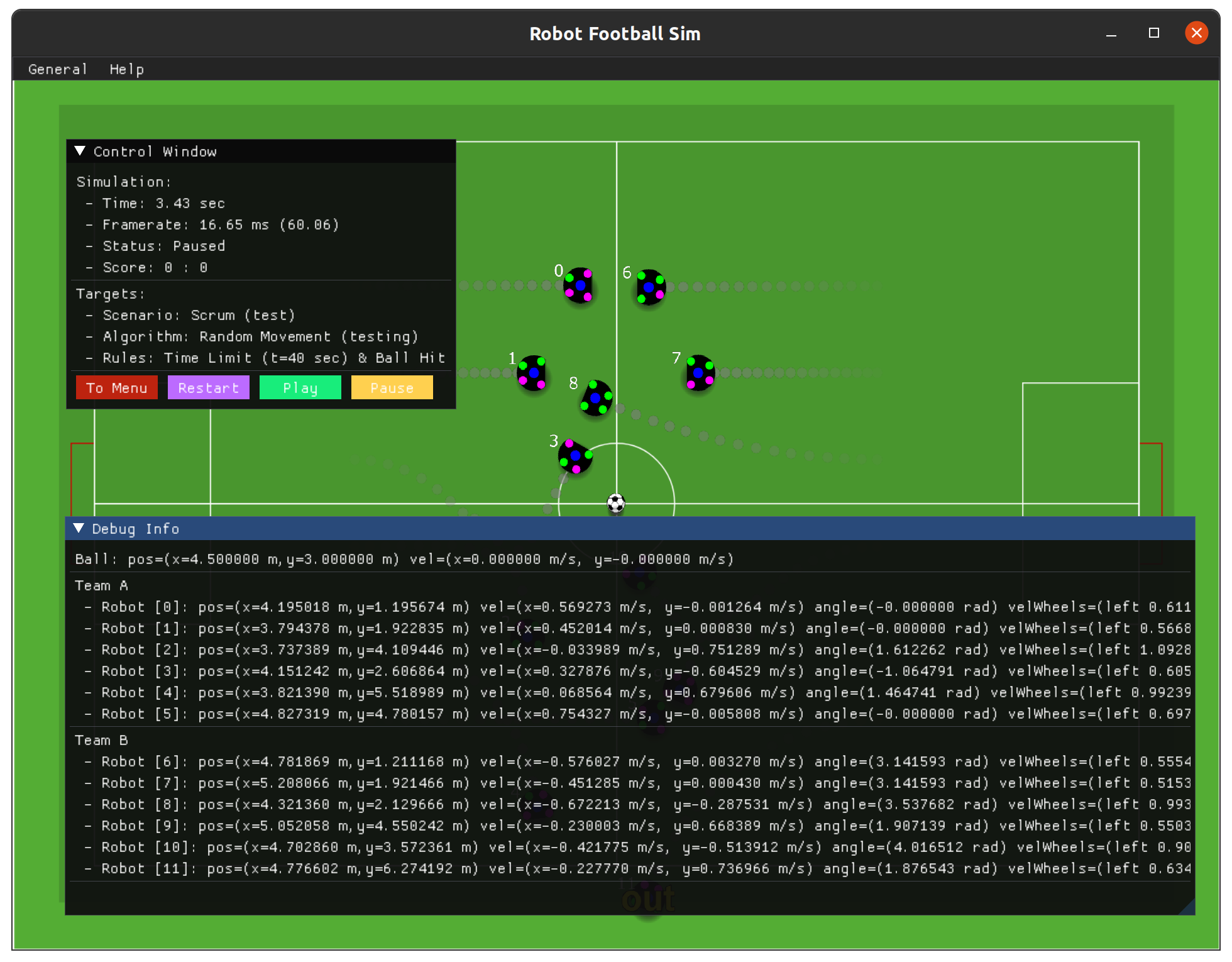
Simulation control menu with features to
pausegame,continuegame from current state ofrestart. Also control window displays some statistic info current simulation: total time in game, current frame rate, score and status. Selected scenario, rules and algorithm also displayed.
-
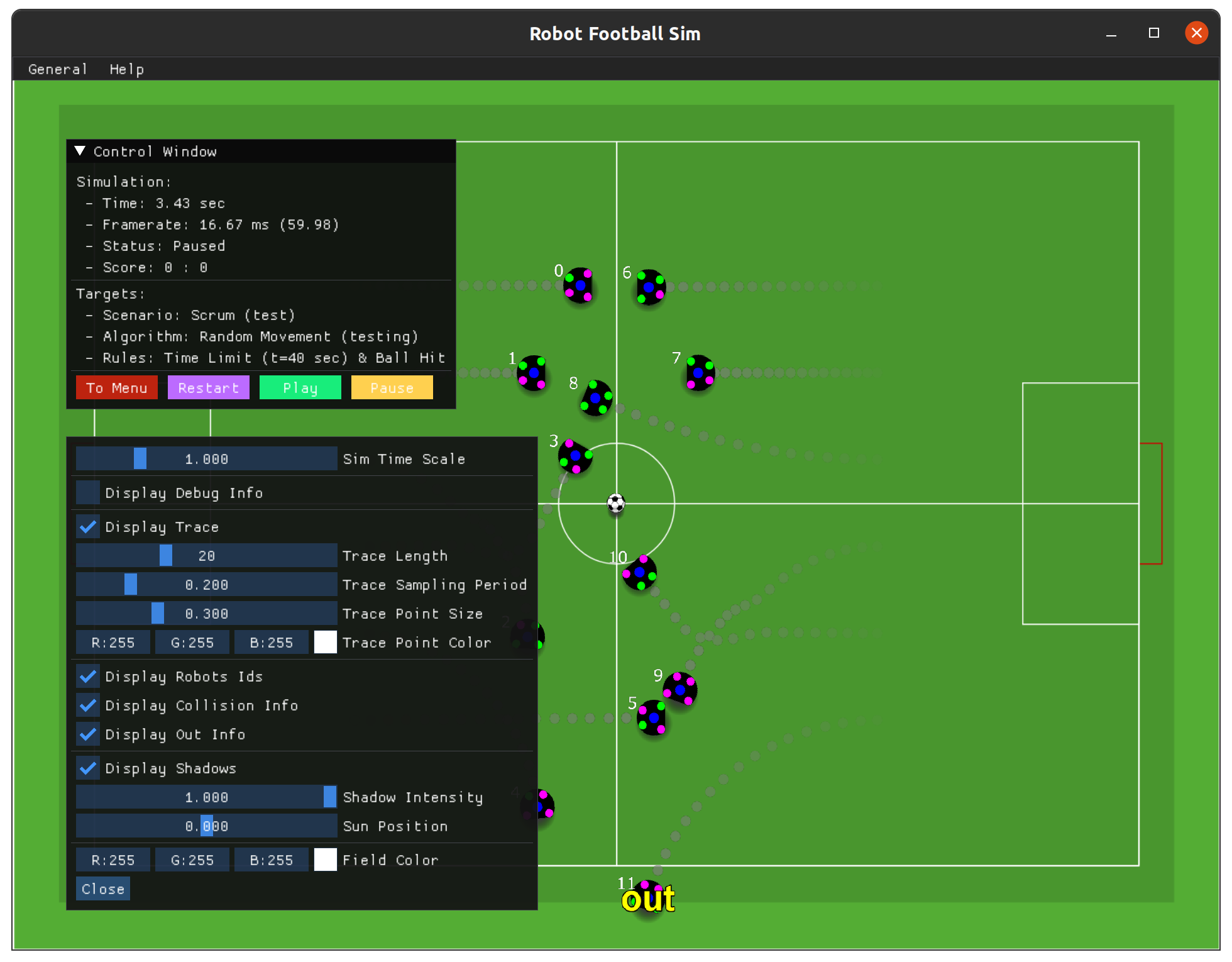
Simulator provides some basic settings tool, which allows to tweak simulation time scale, drawing settings, such as trace information, debug info window, collisions/out info display, shadows settings (including the Sun position), field customization color.
-
Debug info provides current actual information about game state. In includes all dynamic objects properties: position, velocity, rotation (angle, the same as direction), and motors forces.
RobotFootballSim
├── docs - documents, text files and various helpful stuff
├── resource - data used by simulator at runtime
├── rfsim - simulator core source code
│ ├── include - library public C API for algorithm plugins
│ ├── plugins - algorithms for robots (loaded at runtime as shared/dynamic libraries)
│ ├── sources - source-code for implementation
│ │ ├── graphics - graphics server and image io for displaying actual game
│ │ ├── gui - user application sources
│ │ ├── logic - game logic, algorithms and managers
│ │ ├── opengl - low-level gl drawing stuff
│ │ ├── physics - game physics simulation source code
│ │ ├── rules - various game rules to control the game process
│ │ ├── scenario - scenario collectio for dirrent games setup
│ │ ├── shaders - glsl low-level drawing shaders code
│ │ └── utils - utility classes shared among source code modules
│ └── CMakeLists.txt - actual sim build config
├── deps - project dependencies
│ ├── box2d - physics engine
│ ├── dynalo2 - patched dynalo lib for cross-platform shared lib management
│ ├── glew - opengl loader
│ ├── glfw - cross-platform native windowing manager
│ ├── glm - 3d math
│ ├── imgui - cross-platform GUI framework
│ ├── picojson - lightweight json parser
│ └── stb - collection of cross-platfom stb-based image utils
├── CMakeLists.txt - project cmake config, add this as sub-directory to your project
└── config.json - application config file, copyied into build dir at cmake build step
- Unknown Contributor 1
- Unknown Contributor 2
- Unknown Contributor 3
- Unknown Contributor 4
- Unknown Contributor 5
This project is licensed under MIT license. License text can be found in the license file.
This is a research project of students of the Faculty of Mathematics and Mechanics of
St. Petersburg State University as part of the course Algorithmic foundations of robotics
under the guidance of Professor Andrey Nikolaevich Terekhov.