4.Detalles técnicos electrónicos
En esta sección describimos los elementos que componen al kit de Cat Finder, y cómo funcionan en la misión.
Componentes electrónicos y sensores.
| Cantidad | Descripción | Número de parte |
|---|---|---|
| 1 | PCB Tarjeta principal | S/N |
| 1 | PCB Tarjeta Drivers | S/N |
| 1 | PCB Tarjeta Charger | S/N |
| 1 | Bast Pro-Mini | S/N |
| 1 | Sensor de temperatura, humedad y presión atmosférica | BME280 |
| 1 | Módulo múltiple; acelerómetro, barómetro, giroscopio, magnetómetro. | GY-87 |
| 1 | Módulo de calidad del aire, medición CO2 y TVOC | CCS811 |
| 1 | Módulo de comunicación Wifi | ESP-32 |
| 1 | Cámara | LAAF25690927XA |
| 1 | Antena wifi | S/N |
| 2 | Diodo Shotcky | SB260-E3/54 |
| 2 | Capacitores electrolíticos 10uf | 860010372001 |
| 1 | Resistencia 330 Ohms | CFR-25JT-52-330R |
| 1 | Capacitor cerámico 0.1uf | K104K15X7RF53H5 |
| 1 | Regulador 3.3V TO 220 | LD1117AV33 |
| 1 | LED Rojo indicador ON | VLCS5130 |
| 1 | Terminal Block Tornillo 2 P (2 posiciones) | S/N |
| 1 | Tira de pines macho 3p | S/N |
| 1 | Jumper | S/N |
| 1 | Tira de pines macho 6 posiciones | S/N |
| 1 | Cable USB Micro (Bast) | S/N |
| 1 | Cable USB mini (Programador) | S/N |
| 1 | Batería ion-litio 3.7V, 2600mA | S/N |
| 1 | Módulo de programación FTDI | S/N |
| 6 | Cable hembra macho para programación | S/N |
| 1 | Batería 11.1V 1300mah | S/N |
| 1 | Cargador batería 11.1V | S/N |
Las hojas técnicas de cada componente nos proveen información suficiente para trabajar con todos los elementos de nuestro Rover, a continuación dejamos descripción más especifica de cada una de ellas.
4.0.1 Bast Pro-Mini M0
Se trata de lo mejor de un Arduino Pro Mini con un SAMD21 M0 core, con 32 bits de poder, es compatible con todos los pines de un arduino Pro Mini. Esta pequeña Bast es la encargada de leer los sensores por medio de su bus de I2C las cuales sus pines son A4 y A5, que junto con el siguiente elemento hacen posible la transmisión de datos por medio de Wifi.

Características ¿Es la diosa de los gatos?, ¡¡¡Es Bast Pro Mini M0!!! , con un poderoso chip SAMD21E un microcontrolador basado en ARM Cortex-M0 con bajo consumo de energía y alto rendimiento,lo hace ser ideal para un sin fin de aplicaciones. Este chip trabaja a 48MHz, con memoria de programación de 256KB, SRAM de 32KB, trabaja a una tensión de 1.6v a 3.6v, y siendo capaz de trabajar a temperaturas de ¡¡¡-40° hasta los 85°!!! , es un dispositivo impresionante.
Este integrante de la familia Bast. Cuenta con 19 pines, 6 de ellos son pines analogicos, 14 son digitales, es totalmente compatible con el pinout del famoso Arduino Pro Mini, además es posible llevar a cabo la programación de Bast Pro Mini M0 con una variedad de lenguajes de programación como lo son Arduino, Circuit Python y Makecode gracias a que lleva a bordo el bootloader UF2 de Microsoft (link a UF2)
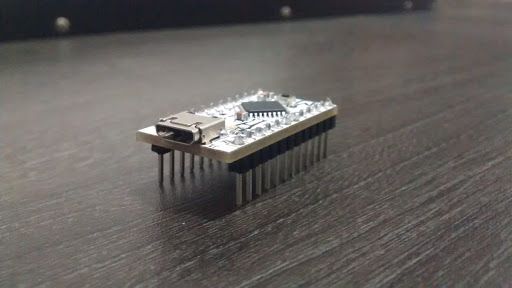
El tamaño de Bast es de apenas solo 3.3cm x 1.8cm este tamaño es muy práctico y conveniente , ¿Quien sospecharia de tanto poder en algo tan pequeño?

Pinouts
Pasadores de potencia
- RAW: Voltaje de 5V que se obtiene si el USB está conectado.
- GND: Es la tierra común para toda la potencia y la lógica.
- VCC: Es el voltaje de 3.3V obtenido del regulador de tensión con el que cuenta, puede suministrar 600 mA (min.)
Pasadores lógicos
- TX: TX transmisor (salida) para serial. Salida PWM
- RX: RX receptor (entrada) para serial. Salida PWM
- 2: Pin digital se puede configurar como entrada o salida digital
- 3: Pin digital se puede configurar como entrada o salida digital
- 4: Pin digital se puede configurar como entrada o salida digital
- 5: Pin digital se puede configurar como entrada o salida digital
- 6: Pin digital se puede configurar como entrada o salida digital
- 7: Pin digital se puede configurar como entrada o salida digital
- 8: Pin digital se puede configurar como entrada o salida digital
- 9: Pin digital se puede configurar como entrada o salida digital salida PWM
- 10: Pin digital.SS: Chip Select o Slave Select, habilita el integrado hacia el que se envían los datos. Esta señal es opcional y en algunos casos no se usa.
- 11: Pin digital .MOSI (Master Output Slave Input): Transmisión de datos hacia el otro integrado. Salida PWM
- 12: Pin digital.MISO (Master Input Slave Output): Es la señal de entrada a nuestro dispositivo, por aquí se reciben los datos desde el otro integrado
- 13: Pin digital.SCK Señal de reloj del bus. Esta señal rige la velocidad a la que se transmite cada bit.
- A0: Pin Analogico.Este pin es una entrada analógica, pero también es una salida analógica debido a que tiene un DAC (convertidor de digital a analógico).
- A1: Este pin es una entrada analogica.
- A2: Este pin es una entrada analogica.
- A3: Este pin es una entrada analogica y cuenta con una salida PWM.
- A5: Este pin es una entrada analogica. y SCL (serial clock) para I2C cuenta además con una salida PWM.
- A5: Este pin es una entrada analogica. y SDA (serial data) para I2C cuenta además con una salida PWM.
- LED: Es un led de uso general.
- PWR: Es un indicador de que la placa está encendida.
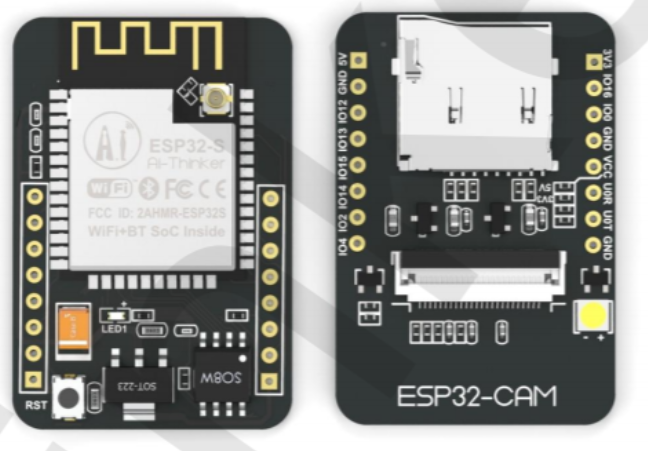
4.0.2 ESP32 CAM
Es una placa de desarrollo con un ESP-32-S, contiene módulo de comunicación bluetooth y Wifi, una cámara con imagen en formato de salida JPEG,BMP,GRAYSCALE, antena integrada en la placa con ganancia de 2dBi y un conector tipo UFL para extender la capacidad de la antena. Su voltaje de alimentación va de 3.3V a 5V y soporta protocolos de comunicación I2C, SPI, UART y salidas PWM.
Documentación: https://loboris.eu/ESP32/ESP32-CAM%20Product%20Specification.pdf
4.0.3 Convertidor USB-Serial FTDI
Este es un dispositivo de comunicación serial es necesario para la programación, comunicación y depuración del ESP-32 CAM USB con la computadora (PC). Características: Voltaje: 3.3-5V Comunicación: Serial (UART)

4.0.4 Sensor GY-87
Módulo que integra varios sensores, llamada unidad de medición inercial (IMU) cuenta con:
MPU6050
- Acelerómetro digital de 3 ejes (sensor de movimiento o caída), medición hasta ±16g
- Giroscopio digital de 3 ejes (sensor de inclinación o ángulo), medición hasta ±2000 º/s
HCM5883L
- Magnetómetro digital de 3 ejes (brújula digital), medición hasta ±8 Gauss
BMP180
- Barómetro de presión absoluta (sensor de presión atmosférica digital), medición de 300 hPa a 1100 hPa.
Características del GY-89:
- Voltaje: 3.3-5V
- Comunicación: I2C

4.0.5 CCS811
Sensor calidad del aire, que nos da valores de niveles de CO2 en ppm y TVOC en ppb. Funciona a 3.3V y se comunica por I2C.

Documentación: https://ams.com/documents/20143/36005/CCS811_DS000459_7-00.pdf
4.0.6 BME280
Sensor ambiental con temperatura, presión barométrica y humedad, se comunica por I2C, y trabaja a 3.3V.

Documentación: https://cdn-shop.adafruit.com/datasheets/BST-BME280_DS001-10.pdf
4.0.7 Cargador de batería
- Corriente de carga: 1A
- Voltaje de Entrada: 4.5 - 5.5V
- Voltaje de carga completa 4.2V
- Indicador de Carga: Led verde
- Cargando, led rojo encendido.
Documentación: https://cdn-shop.adafruit.com/datasheets/BST-BME280_DS001-10.pdf
4.0.8 Antena
- Antena 2.4 Ghz Wifi.
- 2 Db.
- 50 Ohms impedancia.

4.0.9 PCB Main
Es la placa principal del Cat Finder, su objetivo es el funcionamiento del rover:
- Genera una señal WiFi para conectar un dispositivo y controlar el vehículo, visualizar datos de sensores e imagen de la cámara.
- Control de motores conectada a PCB Drivers.
- Carga de batería lipo 3.7V.
- Lectura de sensores.
- Pines de acceso a Bast Pro Mini.
Esta placa esta compuesta por:
- Bast.
- ESP 32 CAM.
- Circuito regulador de voltaje.
- Circuito de carga para batería lipo 3.7V.
- Sensores I2C, BME280, GY-87 y CSS811.

Pines de Bast disponibles
- 10: Pin digital.MISO (Master Input Slave Output): Es la señal de entrada a nuestro dispositivo, por aquí se reciben los datos desde el otro integrado.
- 11: Pin digital .MOSI (Master Output Slave Input): Transmisión de datos hacia el otro integrado. Salida PWM.
- 12: Pin digital.MISO (Master Input Slave Output): Es la señal de entrada a nuestro dispositivo, por aquí se reciben los datos desde el otro integrado.
- 13: Pin digital.SCK Señal de reloj del bus. Esta señal rige la velocidad a la que se transmite cada bit.
- A0: Pin Analogico.Este pin es una entrada analógica, pero también es una salida analógica debido a que tiene un DAC (convertidor de digital a analógico).
4.1.0 PCB Drivers
Se encarga de activar los motores del vehículo. Esta diseñada para conectarce a la PCB main que es en donde se generan las instrucciones para manejar el vehículo.
Características:
Pines a PCB main:
- GND: Tierra PCB main
- ENGINES 1A, 1B, 2A, 2B: Voltaje de entrada de activación de motores, tienen un rango de voltaje de máximo 5.75 V. Se activan por medio de señales dígitales o PWM (recomendada).
- 5V: Voltaje alimentación de drivers de rango de máximo a 7 V. La PCB main se proporciona 3.3V
Drivers DRV8833PWP Datasheet: http://www.ti.com/lit/ds/symlink/drv8833.pdf
Alimentación externa para motores:(VM) máx. de 11.8V
Salidas: 6 conectores terminal block en donde se conectan los motores los cuales son activados por las señales de "ENGINE", alimentados por la batería de máx. 11.8V y funcionando con una corriente de 1.5A por cada driver.

4.1.1 Batería Lon-Litio
Una batería recargable tipo Lipo, en pruebas tiene una duración de hasta 6 hrs.
PRECAUCIÓN: No perforar, calentar o colocar a altas presiones, flameable.
Características:
- Voltaje: 3.7V
- Corriente: 2600 mAh
- Voltaje de carga completa: 4.2V
- Temperatura mínima de trabajo: - 50ºC
4.1.2 Diagramas de las PCB
Cat Finder consta de dos placas o PCB´s que permiten su funcionamiento, una de ellas es la PCB main que es donde se encuentra la computadora que se encarga de procesar todos los datos necesarios para el funcionamiento del vehículo, y en conjunto con la placa de drivers controla los motores con solo comunicarlas con el conector de engines. Para comprender un poco más su funcionamiento los diagramas te ayudaran un poco, que al igual puedes encontrar estos archivos en este repositorio y puedas abrirlos con kiCad.




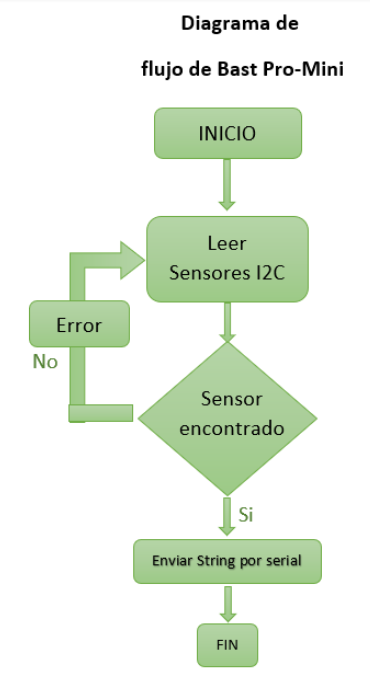
4.1.3 Programa de control
Los dispositivos de control son compatibles para programar con el IDE de Arduino, se necesita programar el ESP-32 CAM para que transmita la imagen, genere una red wifi, nos permite controlar los motores y ver los datos de los sensores de la PCB main. Y también se necesita programas la Bast Pro mini que es la que está obteniendo los datos de los sensores y está en comunicación con el ESP para publicar estos datos en el servidor. Ambos códigos los podemos encontrar en este repositorio, una vez descargados podrás editarlos libremente.
Diagrama de flujo ESP32:

Diagrama de flujo BAST:
4.1.4 Metodología de ensamblado
Una vez que has analizado y entendido cómo funciona el Cat Finder es momento de ensamblarlo. El Cat Finder se compone principalmente de 2 placas electrónicas:
1. PCB main: es la PCB principal ya que es donde se encuentra la computadora del vehículo, los sensores y la cámara.
La cual se deben ensamblar los siguientes componentes:
- 1 ESP-32 CAM
- 1 Cámara
- 1 Bast Pro mini
- 1 Cargador de batería
- 1 GY-87 con tira de pines
- 1 BME80 con tira de pines
- 1 CCS811 con tira de pines
- 1 capacitor cerámico de 0.1uf
- 2 diodos shotcky
- 2 capacitores electrolíticos de 10uf
- 1 regulador de 3.3V
- 1 resistencia de 330 ohms
- 1 led
- 1 terminal block
- 1 tira de pines macho de 3x1 (prog)
- 1 tira de pines macho de 6x1 (motor)
- Jumper
2. PCB Drivers: es la PCB donde esta la circuiteria para activar y dar dirección a los motores, es controlada por la PCB main. Esta placa ya se encuentra con los componentes necesarios para su funcionamiento, lo único que hay que hacer es conectar los motores y conectar a PCB main por los pines de engine según marca su conector.