The summarizer is written for Python 3.6 and PyTorch 0.4.0. I believe you already have numpy. It also requires tqdm for displaying progress bars, and matplotlib for plotting. One of the data preprocessing scripts requires nltk to tokenize text.
For ROUGE evaluation, please put ROUGE-1.5.5.pl and its data directory under data/ (i.e. there will be a data/data/ directory); pyrouge is not required.
The expected data format is a text file (or a gzipped version of this, marked by the extension .gz) containing one example per line.
In each line, the source and the summary texts are separated by a tab, and are both already tokenized (you can add your own tokenizer in utils.py).
Paragraph breaks (newlines) are represented by the special token <P>.
In the data/ directory, two scripts are provided to prepare the Google sentence compression data and the CNN/Daily Mail corpus for this summarizer.
Running train.py will start training using the parameters set in params.py.
Description of the parameters is provided below.
To resume a stopped training process, run the script with the command line option --resume_from X.train.pt, where X.train.pt is the filename of your saved training status.
You can also use commandline options to override any parameter set in params.py; for example --cover_loss 1 sets cover_loss to 1.
When resuming from a saved state, the original parameters will be used and params.py will be ignored, but you can still override some of the parameters using commandline options.
Running test.py will evaluate the latest model trained using the parameters set in params.py.
It uses a beam search decoder, and will print out ROUGE scores.
You can also let it save the decoded summaries.
 The model is defined in
The model is defined in model.py, with the encoder, the decoder, and the combined model as three modules.
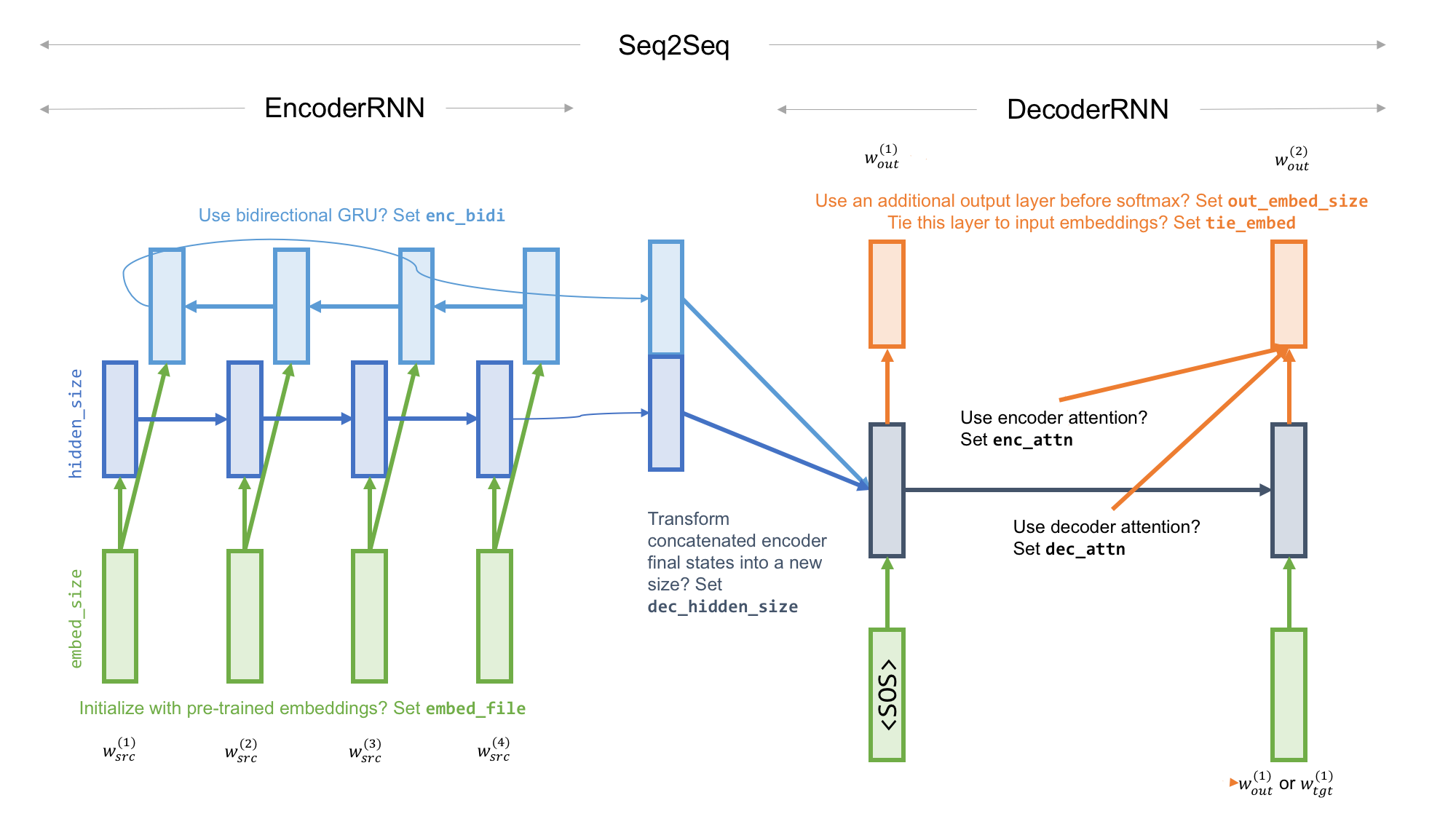
As background, this tutorial outlines the general network architecture.
| Parameter | Meaning |
|---|---|
| vocab_size | Vocabulary size of the encoder and the decoder |
| hidden_size | Size of the hidden state of the encoder RNN |
| dec_hidden_size | If set, a matrix will transform the final encoder state (concatenated if bidirectional) into this size for the decoder RNN |
| embed_size | Size of the input word embeddings of the encoder and the decoder (they share the same word embeddings) |
| enc_bidi | Whether the encoder RNN is bidirectional; if true, the default decoder hidden size is hidden_size * 2 |
| enc_attn | Whether the decoder output depends on attention over encoder states |
| dec_attn | Whether the decoder output depends on attention over past decoder states (to avoid repetition) |
| pointer | Whether to use the pointer-generator network (requires enc_attn); a pointer network copies words (can be out-of-vocabulary) from the source |
| out_embed_size | If set, a matrix will transform the decoder hidden state (its concatenation with encoder context and/or decoder context if enc_attn and/or dec_attn are true) into this size before applying softmax to generate an output word |
| tie_embed | Whether the output word embeddings are tied to the input ones; if true, out_embed_size is automatically set to embed_size |
| Parameter | Meaning |
|---|---|
| enc_attn_cover | Whether to provide the coverage vector as an input to the computation of attention over encoder states |
| cover_func | What function (sum or max) should be used to aggregate previous attention distributions |
| cover_loss | Coverage loss is multiplied by this value when added to total loss |
| show_cover_loss | Whether to include coverage loss in total loss when displaying it in the progress bar |
The coverage mechanism is similar to that of See et al. (2017), whose cover_func is sum.
It has two components: one is in the model architecture, i.e. considering the coverage vector when computing attention, and the other in the loss, i.e. discouraging repeatedly attending to the same area of the input sequence.
Note that because I use the simpler bilinear (Luong's "general") attention instead of their Bahdanau (Luong's "concat") attention, the coverage vector is also used in a simpler way. That is, I subtract (with a learned weight) the coverage vector from the attention values prior to softmax.
Currently, only four dropout parameters are implemented.
| Parameter | Meaning |
|---|---|
| optimizer | Optimizer (adam or adagrad) |
| lr | Learning rate |
| adagrad_accumulator | The initial accumulator value of Adagrad |
| batch_size | Batch size during training |
| n_batches | Number of training batches per epoch |
| val_batch_size | Batch size during validation |
| n_val_batches | Number of validation batches per epoch |
| n_epochs | Total number of epochs |
| pack_seq | If true, the PyTorch functions pack_padded_sequence, pad_packed_sequence will be used to skip <PAD> inputs |
| grad_norm | Gradient clipping: the maximum gradient norm that large gradients are scaled to |
| Parameter | Meaning |
|---|---|
| forcing_ratio | Initial percentage of using teacher forcing |
| partial_forcing | If true, the random choice between teacher forcing and using the model's own output occurs every step, not every batch |
| forcing_decay_type | If set (linear, exp, or sigmoid), teacher forcing ratio is decreased after every batch |
| forcing_decay | See below for explanation |
| sample | If true, when not teacher forcing, the next input word is sampled from the output word distribution, instead of always using the word of the highest probability |
Three types of teacher forcing ratio decay (Bengio et al., 2015) are implemented:
- Linear: Ratio is decreased by
forcing_decayevery batch. - Exponential: Ratio is multiplied by
forcing_decayevery batch. - Inverse sigmoid: Ratio is k/(k + exp(i/k)) where k is
forcing_decayand i is batch number.
Reinforcement learning (RL) using self-critical policy gradient is implemented following Paulus et al. (2018). RL loss is based on the difference in ROUGE score between a sampled output (words are sampled from the softmax distribution) and a greedy baseline (words that have the highest probabilities are chosen).
| Parameter | Meaning |
|---|---|
| rl_ratio | The weight in [0,1) of RL loss in the loss function; RL will be disabled if set to 0 |
| rl_ratio_power | A factor in (0,1]; rl_ratio is set to rl_ratio ** rl_ratio_power after every epoch to increase the weight of RL loss |
| rl_start_epoch | The epoch from when RL loss is enabled; useful because you want a strong baseline when RL begins |
| Parameter | Meaning |
|---|---|
| embed_file | Path to the word embedding file; if set, input word embeddings will be initialized by pretrained embeddings |
| data_path | Path to training data |
| val_data_path | Path to validation data (optional) |
| max_src_len | The maximum allowed length of every source text |
| max_tgt_len | The maximum allowed length of every target text (reference summary) |
| truncate_src | Whether to truncate source texts to max_src_len; if false, examples with overlong source text are discarded |
| truncate_tgt | Whether to truncate target texts to max_tgt_len; if false, examples with overlong target text are discarded |
| model_path_prefix | The common prefix of models saved during training. |
| keep_every_epoch | If false, only models of the latest epoch and the best epoch will be kept |
Three types of files will be saved after every epoch (if model_path_prefix is X):
- The model after epoch n is saved as
X.n.pt. - The training status (for resuming) is saved as
X.train.pt. - The plot of loss (training in blue, validation in green) and ROUGE-L (in red) is saved as
X.png.
| Parameter | Meaning |
|---|---|
| beam_size | The beam size of the beam search decoder |
| min_out_len | The minimum acceptable output length |
| max_out_len | The maximum acceptable output length |
| out_len_in_words | If true, the output length does not count non-words such as punctuations |
| test_data_path | Path to testing data |
| test_sample_ratio | If less than 1, only this portion (randomly sampled) of the test set will be used |
| test_save_results | If true, the decoded outputs will be saved in a file X.results.tgz where X is model_path_prefix |
ROUGE-1, ROUGE-2, ROUGE-L and ROUGE-SU4 are reported. ROUGE-L is also used in validation and RL. Please feel free to try other ROUGE metrics.
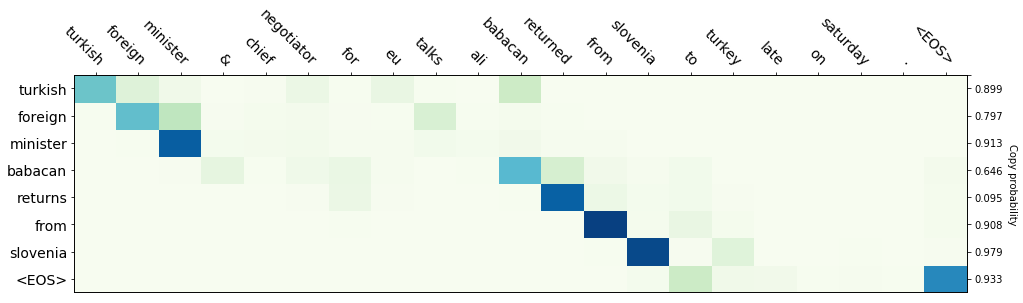
A function show_attention_map is provided to visualize the attention weights over encoder states and the copying probability of the pointer-generator.
- Bengio, S., Vinyals, O., Jaitly, N., & Shazeer, N. (2015). Scheduled sampling for sequence prediction with recurrent neural networks. In Advances in NIPS.
- Paulus, R., Xiong, C., & Socher, R. (2018). A deep reinforced model for abstractive summarization. In ICLR.
- See, A., Liu, P. J., & Manning, C. D. (2017). Get to the point: Summarization with pointer-generator networks. In ACL.
Due to change of circumstances, the original author of this repository can no longer maintain the repo. If you would like to maintain it, please contact @ymfa . Thank you!