-
Notifications
You must be signed in to change notification settings - Fork 1
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
added video_stream_opencv package for use with the ar tags
- Loading branch information
Showing
15 changed files
with
645 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,11 @@ | ||
| ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ | ||
| Changelog for package video_stream_opencv | ||
| ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ | ||
|
|
||
| 1.0.2 (2016-11-14) | ||
| ------------------ | ||
|
|
||
| 1.0.1 (2016-11-14) | ||
| ------------------ | ||
| * Releasable version | ||
| * Contributors: Sammy Pfeiffer, Stefano Probst, Wiebe Van Ranst |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,36 @@ | ||
| cmake_minimum_required(VERSION 2.8.3) | ||
| project(video_stream_opencv) | ||
|
|
||
| find_package(catkin REQUIRED COMPONENTS | ||
| roscpp | ||
| rospy | ||
| cv_bridge | ||
| image_transport | ||
| camera_info_manager | ||
| sensor_msgs | ||
| ) | ||
|
|
||
|
|
||
| find_package(OpenCV) | ||
|
|
||
| catkin_package() | ||
|
|
||
| include_directories( | ||
| ${catkin_INCLUDE_DIRS} | ||
| ${OpenCV_INCLUDE_DIRS} | ||
| ) | ||
|
|
||
| add_executable(video_stream src/video_stream.cpp) | ||
| target_link_libraries(video_stream ${catkin_LIBRARIES} ${OpenCV_LIBRARIES}) | ||
|
|
||
| install(TARGETS video_stream | ||
| RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}) | ||
|
|
||
| install(PROGRAMS | ||
| scripts/test_video_resource.py | ||
|
|
||
| DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} | ||
| ) | ||
|
|
||
| install(DIRECTORY launch | ||
| DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,64 @@ | ||
| A package to view video streams based on the [OpenCV VideoCapture module](http://docs.opencv.org/modules/highgui/doc/reading_and_writing_images_and_video.html#videocapture), easy way to publish on a ROS Image topic (including camera info) usb cams, ethernet cameras, video streams or video files. It also supports flipping of images. | ||
|
|
||
| 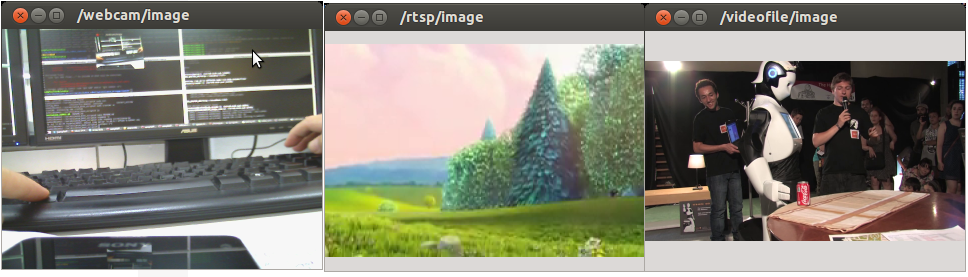 | ||
|
|
||
| Example usages in launch folder (**only the argument `video_stream_provider` is mandatory**): | ||
|
|
||
| ```xml | ||
| <launch> | ||
| <!-- launch video stream --> | ||
| <include file="$(find video_stream_opencv)/launch/camera.launch" > | ||
| <!-- node name and ros graph name --> | ||
| <arg name="camera_name" value="webcam" /> | ||
| <!-- means video device 0, /dev/video0 --> | ||
| <arg name="video_stream_provider" value="0" /> | ||
| <!-- throttling the querying of frames to --> | ||
| <arg name="fps" value="30" /> | ||
| <!-- setting frame_id --> | ||
| <arg name="frame_id" value="webcam" /> | ||
| <!-- camera info loading, take care as it needs the "file:///" at the start , e.g.: | ||
| "file:///$(find your_camera_package)/config/your_camera.yaml" --> | ||
| <arg name="camera_info_url" value="" /> | ||
| <!-- flip the image horizontally (mirror it) --> | ||
| <arg name="flip_horizontal" value="false" /> | ||
| <!-- flip the image vertically --> | ||
| <arg name="flip_vertical" value="false" /> | ||
| <!-- force a width and height, 0 means no forcing --> | ||
| <arg name="width" value="640"/> | ||
| <arg name="height" value="480"/> | ||
| <!-- visualize on an image_view window the stream generated --> | ||
| <arg name="visualize" value="true" /> | ||
| </include> | ||
| </launch> | ||
| ``` | ||
|
|
||
| Based on the ROS [tutorial to convert opencv images to ROS messages](http://wiki.ros.org/image_transport/Tutorials/PublishingImages). | ||
|
|
||
| === | ||
|
|
||
| You can use any input that OpenCV on your system accepts, e.g.: | ||
|
|
||
| * Video devices that appear in linux as /dev/videoX, e.g.: USB webcams appearing as /dev/video0 | ||
|
|
||
| * Video streamings, e.g.: rtsp://wowzaec2demo.streamlock.net/vod/mp4:BigBuckBunny_115k.mov | ||
|
|
||
| * Video files, anything you can play, e.g.: myvideo.avi | ||
|
|
||
| * Etc. | ||
|
|
||
| === | ||
|
|
||
| In the scripts folder you'll find `test_video_resource.py` which you can use to test if your system | ||
| installation can use this node to open your video stream (not using any ROS). Just do any of those: | ||
|
|
||
| ./test_video_resource.py 0 | ||
| ./test_video_resource.py rtsp://wowzaec2demo.streamlock.net/vod/mp4:BigBuckBunny_115k.mov | ||
| ./test_video_resource.py /home/youruser/myvideo.mkv | ||
|
|
||
| And you'll see an output like: | ||
|
|
||
| Trying to open resource: /dev/video0 | ||
| Correctly opened resource, starting to show feed. | ||
|
|
||
| With an OpenCV image show window showing the stream (which should close when pressing ESC, or Control+C the shell). | ||
|
|
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,20 @@ | ||
| image_width: 1280 | ||
| image_height: 960 | ||
| camera_name: "0800461000822014" | ||
| camera_matrix: | ||
| rows: 3 | ||
| cols: 3 | ||
| data: [2302.59, 0, 610.756, 0, 2309.46, 506.539, 0, 0, 1] | ||
| distortion_model: plumb_bob | ||
| distortion_coefficients: | ||
| rows: 1 | ||
| cols: 5 | ||
| data: [-0.225495, -0.363048, -0.000477994, -0.000132753, 0] | ||
| rectification_matrix: | ||
| rows: 3 | ||
| cols: 3 | ||
| data: [1, 0, 0, 0, 1, 0, 0, 0, 1] | ||
| projection_matrix: | ||
| rows: 3 | ||
| cols: 4 | ||
| data: [2302.59, 0, 610.756, 0, 0, 2309.46, 506.539, 0, 0, 0, 1, 0] |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,44 @@ | ||
| <launch> | ||
| <arg name="camera_name" default="camera" /> | ||
| <!-- video_stream_provider can be a number as a video device or a url of a video stream --> | ||
| <arg name="video_stream_provider" default="0" /> | ||
| <!-- frames per second to query the camera for --> | ||
| <arg name="fps" default="30" /> | ||
| <!-- frame_id for the camera --> | ||
| <arg name="frame_id" default="$(arg camera_name)" /> | ||
| <!-- By default, calibrations are stored to file://${ROS_HOME}/camera_info/${NAME}.yaml | ||
| To use your own fill this arg with the corresponding url, e.g.: | ||
| "file:///$(find your_camera_package)/config/your_camera.yaml" --> | ||
| <arg name="camera_info_url" default="" /> | ||
| <!-- flip the image horizontally (mirror it) --> | ||
| <arg name="flip_horizontal" default="false" /> | ||
| <!-- flip the image vertically --> | ||
| <arg name="flip_vertical" default="false" /> | ||
| <!-- force width and height, 0 means no forcing --> | ||
| <arg name="width" default="0"/> | ||
| <arg name="height" default="0"/> | ||
| <!-- if show a image_view window subscribed to the generated stream --> | ||
| <arg name="visualize" default="false"/> | ||
|
|
||
|
|
||
| <!-- images will be published at /camera_name/image with the image transports plugins (e.g.: compressed) installed --> | ||
| <group ns="$(arg camera_name)"> | ||
| <node pkg="video_stream_opencv" type="video_stream" name="$(arg camera_name)_stream" output="screen"> | ||
| <remap from="camera" to="image_raw" /> | ||
| <param name="camera_name" type="string" value="$(arg camera_name)" /> | ||
| <param name="video_stream_provider" type="string" value="$(arg video_stream_provider)" /> | ||
| <param name="fps" type="int" value="$(arg fps)" /> | ||
| <param name="frame_id" type="string" value="$(arg frame_id)" /> | ||
| <param name="camera_info_url" type="string" value="$(arg camera_info_url)" /> | ||
| <param name="flip_horizontal" type="bool" value="$(arg flip_horizontal)" /> | ||
| <param name="flip_vertical" type="bool" value="$(arg flip_vertical)" /> | ||
| <param name="width" type="int" value="$(arg width)" /> | ||
| <param name="height" type="int" value="$(arg height)" /> | ||
| </node> | ||
|
|
||
| <node if="$(arg visualize)" name="$(arg camera_name)_image_view" pkg="image_view" type="image_view"> | ||
| <remap from="image" to="image_raw" /> | ||
| </node> | ||
| </group> | ||
|
|
||
| </launch> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,22 @@ | ||
| <launch> | ||
| <!-- launch video stream --> | ||
| <include file="$(find video_stream_opencv)/launch/camera.launch" > | ||
| <!-- node name and ros graph name --> | ||
| <arg name="camera_name" value="axis_videocap" /> | ||
| <!-- url of the video stream --> | ||
| <arg name="video_stream_provider" value="http://10.68.0.6/mjpg/video.mjpg" /> | ||
| <!-- throttling the querying of frames to --> | ||
| <arg name="fps" value="30" /> | ||
| <!-- setting frame_id --> | ||
| <arg name="frame_id" value="axis_optical_frame" /> | ||
| <!-- camera info loading, take care as it needs the "file:///" at the start , e.g.: | ||
| "file:///$(find your_camera_package)/config/your_camera.yaml" --> | ||
| <arg name="camera_info_url" value="" /> | ||
| <!-- flip the image horizontally (mirror it) --> | ||
| <arg name="flip_horizontal" value="false" /> | ||
| <!-- flip the image vertically --> | ||
| <arg name="flip_vertical" value="false" /> | ||
| <!-- visualize on an image_view window the stream generated --> | ||
| <arg name="visualize" value="false" /> | ||
| </include> | ||
| </launch> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,22 @@ | ||
| <launch> | ||
| <!-- launch video stream --> | ||
| <include file="$(find video_stream_opencv)/launch/camera.launch" > | ||
| <!-- node name and ros graph name --> | ||
| <arg name="camera_name" value="rtsp" /> | ||
| <!-- url of the video stream --> | ||
| <arg name="video_stream_provider" value="rtsp://wowzaec2demo.streamlock.net/vod/mp4:BigBuckBunny_115k.mov" /> | ||
| <!-- throttling the querying of frames to --> | ||
| <arg name="fps" value="30" /> | ||
| <!-- setting frame_id --> | ||
| <arg name="frame_id" value="rtsp_frame" /> | ||
| <!-- camera info loading, take care as it needs the "file:///" at the start , e.g.: | ||
| "file:///$(find your_camera_package)/config/your_camera.yaml" --> | ||
| <arg name="camera_info_url" value="" /> | ||
| <!-- flip the image horizontally (mirror it) --> | ||
| <arg name="flip_horizontal" value="false" /> | ||
| <!-- flip the image vertically --> | ||
| <arg name="flip_vertical" value="false" /> | ||
| <!-- visualize on an image_view window the stream generated --> | ||
| <arg name="visualize" value="true" /> | ||
| </include> | ||
| </launch> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,17 @@ | ||
| <launch> | ||
| <!-- launch video stream --> | ||
| <include file="$(find video_stream_opencv)/launch/camera.launch" > | ||
| <!-- node name and ros graph name --> | ||
| <arg name="camera_name" value="rtsp" /> | ||
| <!-- url of the video stream --> | ||
| <arg name="video_stream_provider" value="rtsp://wowzaec2demo.streamlock.net/vod/mp4:BigBuckBunny_115k.mov" /> | ||
| <!-- throttling the querying of frames to --> | ||
| <arg name="fps" value="30" /> | ||
| <!-- setting frame_id --> | ||
| <arg name="frame_id" value="rtsp" /> | ||
| <!-- camera info loading, take care as it needs the "file:///" at the start , e.g.:--> | ||
| <arg name="camera_info_url" value="file:///$(find video_stream_opencv)/config/test_calibration.yaml"/> | ||
| <!-- visualize on an image_view window the stream generated --> | ||
| <arg name="visualize" value="true" /> | ||
| </include> | ||
| </launch> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,22 @@ | ||
| <launch> | ||
| <!-- launch video stream --> | ||
| <include file="$(find video_stream_opencv)/launch/camera.launch" > | ||
| <!-- node name and ros graph name --> | ||
| <arg name="camera_name" value="videofile" /> | ||
| <!-- full path to the video file --> | ||
| <arg name="video_stream_provider" value="/home/sampfeiffer/Videos/REEM_grasping.mp4" /> | ||
| <!-- throttling the querying of frames to --> | ||
| <arg name="fps" value="30" /> | ||
| <!-- setting frame_id --> | ||
| <arg name="frame_id" value="videofile_frame" /> | ||
| <!-- camera info loading, take care as it needs the "file:///" at the start , e.g.: | ||
| "file:///$(find your_camera_package)/config/your_camera.yaml" --> | ||
| <arg name="camera_info_url" value="" /> | ||
| <!-- flip the image horizontally (mirror it) --> | ||
| <arg name="flip_horizontal" value="false" /> | ||
| <!-- flip the image vertically --> | ||
| <arg name="flip_vertical" value="false" /> | ||
| <!-- visualize on an image_view window the stream generated --> | ||
| <arg name="visualize" value="true" /> | ||
| </include> | ||
| </launch> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,27 @@ | ||
| <launch> | ||
| <!-- launch video stream --> | ||
| <include file="$(find video_stream_opencv)/launch/camera.launch" > | ||
| <!-- node name and ros graph name --> | ||
| <arg name="camera_name" value="webcam" /> | ||
| <!-- means video device 0, /dev/video0 --> | ||
| <arg name="video_stream_provider" value="0" /> | ||
| <!-- throttling the querying of frames to --> | ||
| <arg name="fps" value="30" /> | ||
| <!-- setting frame_id --> | ||
| <arg name="frame_id" value="webcam_optical_frame" /> | ||
| <!-- camera info loading, take care as it needs the "file:///" at the start , e.g.: | ||
| "file:///$(find your_camera_package)/config/your_camera.yaml" --> | ||
| <arg name="camera_info_url" value="" /> | ||
| <!-- flip the image horizontally (mirror it) --> | ||
| <arg name="flip_horizontal" value="false" /> | ||
| <!-- flip the image vertically --> | ||
| <arg name="flip_vertical" value="false" /> | ||
| <!-- force width and height, 0 means no forcing --> | ||
| <!-- | ||
| <arg name="width" value="0"/> | ||
| <arg name="height" value="0"/> | ||
| --> | ||
| <!-- visualize on an image_view window the stream generated --> | ||
| <arg name="visualize" value="true" /> | ||
| </include> | ||
| </launch> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,36 @@ | ||
| <?xml version="1.0"?> | ||
| <package> | ||
| <name>video_stream_opencv</name> | ||
| <version>1.0.2</version> | ||
|
|
||
| <description> | ||
| The video_stream_opencv package contains a node to publish a video stream (the protocols that | ||
| opencv supports are supported, including rtsp, webcams on /dev/video and video files) in ROS image topics, it supports camera info and basic image flipping (horizontal, vertical or both) capabilities. | ||
| </description> | ||
|
|
||
| <maintainer email="[email protected]">Sammy Pfeiffer</maintainer> | ||
| <author>Sammy Pfeiffer</author> | ||
|
|
||
| <url type="website">http://www.ros.org/wiki/video_stream_opencv</url> | ||
| <url type="development">https://github.com/ros-drivers/video_stream_opencv</url> | ||
| <url type="bugtracker">https://github.com/ros-drivers/video_stream_opencv/issues</url> | ||
|
|
||
| <license>BSD</license> | ||
|
|
||
| <buildtool_depend>catkin</buildtool_depend> | ||
|
|
||
| <build_depend>cv_bridge</build_depend> | ||
| <build_depend>image_transport</build_depend> | ||
| <build_depend>camera_info_manager</build_depend> | ||
| <build_depend>roscpp</build_depend> | ||
| <build_depend>rospy</build_depend> | ||
| <build_depend>sensor_msgs</build_depend> | ||
|
|
||
| <run_depend>cv_bridge</run_depend> | ||
| <run_depend>image_transport</run_depend> | ||
| <run_depend>camera_info_manager</run_depend> | ||
| <run_depend>roscpp</run_depend> | ||
| <run_depend>rospy</run_depend> | ||
| <run_depend>sensor_msgs</run_depend> | ||
|
|
||
| </package> |
Oops, something went wrong.