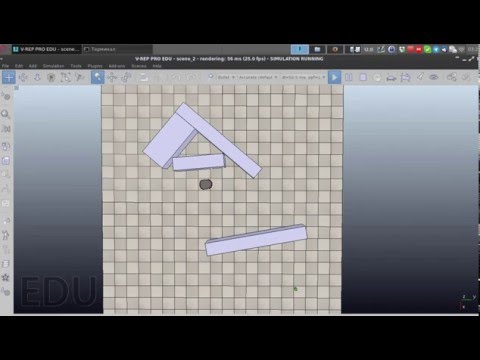
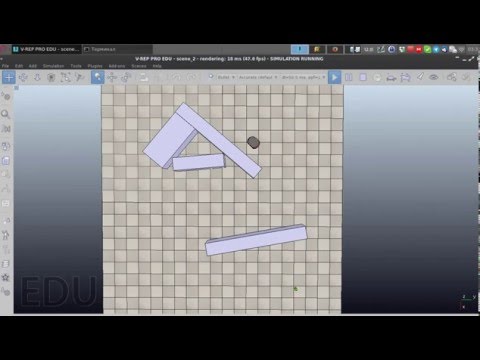
This project is implementation of Bug's algorithms for mobile robots in V-REP robot simulator.
You can see demo video in /video folder or on youtube:
- Bug 1

- Bug 2
- Bug 3
-
If you don't have then you must to install Python and V-REP simulator.
-
Start V-REP and open some scene from
scenes/folder, then start simulation. -
If you don't use x64 Linux then look at official documentation. It's similar to this tutorial.
To use the remote API functionality in your Python script, you will need following 3 items:
- vrep.py
- vrepConst.py
- remoteApi.dll, remoteApi.dylib or remoteApi.so (depending on your target platform)
Above files are located in V-REP's installation directory, under
programming/remoteApiBindings/python.Note:You can add last version of these files manually!remoteApi.so- to folder withmain.pyscript.vrep.pyandvrepConst.py- to foldersrc/vrep/. -
run
$python main.py --help.