-
Notifications
You must be signed in to change notification settings - Fork 2
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
0 parents
commit a7f1e59
Showing
9 changed files
with
1,178 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,19 @@ | ||
| cmake_minimum_required(VERSION 3.15) | ||
| project(SofaSimpleForcefield VERSION 1.0) | ||
|
|
||
| find_package(Sofa.Core REQUIRED) | ||
| find_package(Eigen3 REQUIRED) | ||
|
|
||
| set(CMAKE_CXX_STANDARD 17) | ||
|
|
||
| add_library(${PROJECT_NAME} SHARED init.cpp SVKElasticForcefield.cpp) | ||
| target_link_libraries(${PROJECT_NAME} PUBLIC Sofa.Core Eigen3::Eigen) | ||
|
|
||
| sofa_create_package_with_targets( | ||
| PACKAGE_NAME ${PROJECT_NAME} | ||
| PACKAGE_VERSION ${PROJECT_VERSION} | ||
| TARGETS ${PROJECT_NAME} AUTO_SET_TARGET_PROPERTIES | ||
| INCLUDE_SOURCE_DIR "src" | ||
| INCLUDE_INSTALL_DIR ${PROJECT_NAME} | ||
| RELOCATABLE "plugins" | ||
| ) |
Large diffs are not rendered by default.
Oops, something went wrong.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,38 @@ | ||
| # Simple implementation of a Saint-Venant-Kirchhoff force field | ||
|
|
||
| This plugin can be used as a simple demonstration of how SOFA | ||
| "force fields" components are built up. In this case, the force | ||
| field API will provide the internal potential energy, | ||
| residual and jacobian of a Saint-Venant-Kirchhoff material assembled | ||
| on linear tetrahedral meshes. These three function will be used | ||
| by the system assembler and ODE solvers of SOFA. | ||
|
|
||
| ## Compiling with Ubuntu LTS 20.04 | ||
| ### SOFA (skip this if you already compiled SOFA) | ||
|
|
||
| ```console | ||
| user@host:~$ sudo apt install qtbase5-dev libqt5charts5-dev libqt5opengl5-dev libopengl0 libeigen3-dev libglew-dev zlib1g-dev libboost-dev libboost-filesystem-dev g++ cmake git | ||
| user@host:~$ export SOFA_SRC=/opt/sofa_src | ||
| user@host:~$ export SOFA_ROOT=/opt/sofa | ||
| user@host:~$ git clone https://github.com/sofa-framework/sofa.git $SOFA_SRC | ||
| user@host:~$ cmake -DCMAKE_INSTALL_PREFIX=$SOFA_ROOT -DCMAKE_BUILD_TYPE=Release -S $SOFA_SRC -B $SOFA_SRC/build | ||
| user@host:~$ cmake --build $SOFA_SRC/build -j4 | ||
| user@host:~$ cmake --install $SOFA_SRC/build | ||
| ``` | ||
|
|
||
| ### SofaSimpleForcefield | ||
| ```console | ||
| user@host:~$ export SSFF_SRC=/opt/SofaSimpleForceField_src | ||
| user@host:~$ git clone https://github.com/jnbrunet/SofaSimpleForcefield.git $SSFF_SRC | ||
| user@host:~$ cmake -DCMAKE_PREFIX_PATH=$SOFA_ROOT/lib/cmake -DCMAKE_INSTALL_PREFIX=$SOFA_ROOT/plugins/SofaSimpleForceField -DCMAKE_BUILD_TYPE=Release -S $SSFF_SRC -B $SSFF_SRC/build | ||
| user@host:~$ cmake --build $SSFF_SRC/build -j4 | ||
| user@host:~$ cmake --install $SSFF_SRC/build | ||
| ``` | ||
|
|
||
| ## Running the cantilever example scene | ||
| ```console | ||
| user@host:~$ $SOFA_ROOT/bin/runSofa -l SofaSimpleForceField $SSFF_SRC/cantilever_beam.scn | ||
| ``` | ||
|
|
||
| ## Result | ||
| 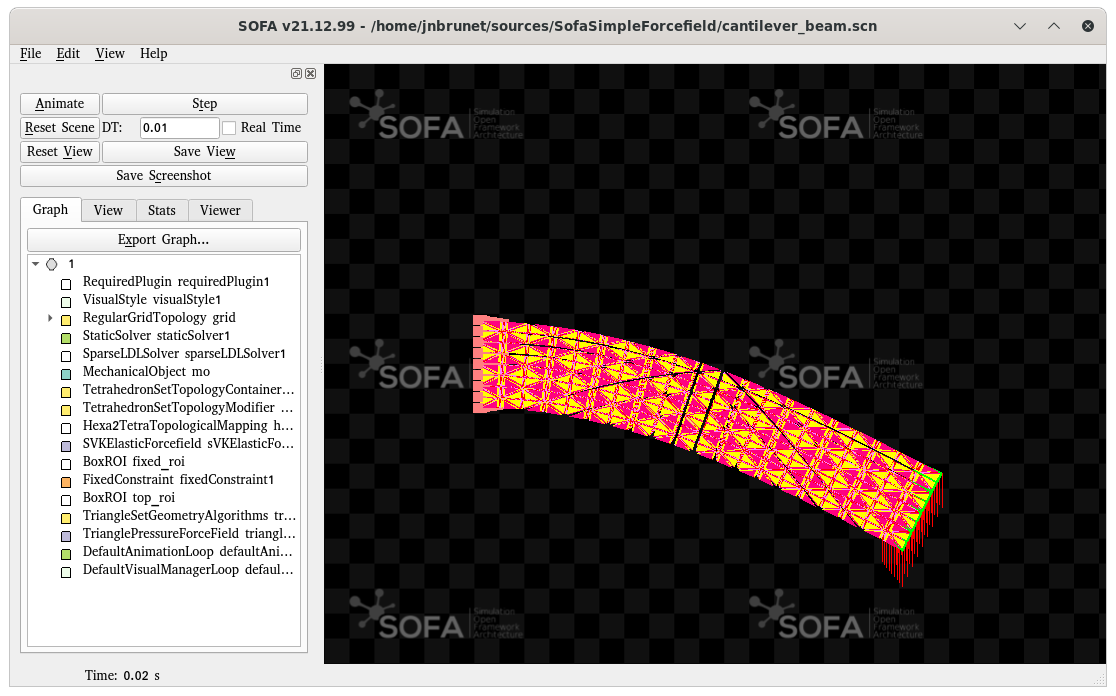 |
Large diffs are not rendered by default.
Oops, something went wrong.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,75 @@ | ||
| #pragma once | ||
|
|
||
| #include <sofa/core/behavior/ForceField.h> | ||
| #include <sofa/core/topology/BaseTopology.h> | ||
| #include <Eigen/Eigen> | ||
| #include "Tetrahedron.h" | ||
|
|
||
|
|
||
| class SVKElasticForcefield : public sofa::core::behavior::ForceField<sofa::defaulttype::Vec3Types> { | ||
| public: | ||
| SOFA_CLASS(SVKElasticForcefield, SOFA_TEMPLATE(sofa::core::behavior::ForceField, sofa::defaulttype::Vec3Types)); | ||
|
|
||
| // Aliases | ||
| using Element = Tetrahedron; | ||
| using Coord = sofa::type::Vec3; | ||
|
|
||
| template <class T> | ||
| using Data = sofa::core::objectmodel::Data<T>; | ||
|
|
||
| template <typename ObjectType> | ||
| using Link = sofa::core::objectmodel::SingleLink<SVKElasticForcefield, ObjectType, sofa::core::objectmodel::BaseLink::FLAG_STRONGLINK>; | ||
|
|
||
| // Data structures | ||
|
|
||
| struct GaussNode { | ||
| Real weight = 0; | ||
| Real jacobian_determinant = 0; | ||
| Eigen::Matrix<double, Element::NumberOfNodes, 3> dN_dx = Eigen::Matrix<double, Element::NumberOfNodes, 3>::Zero(); | ||
| }; | ||
|
|
||
| // public methods | ||
| SVKElasticForcefield(); | ||
|
|
||
| /** | ||
| * Initialize the forcefield by pre-computing the derivative of the shape function at each | ||
| * Gauss point w.r.t the initial (undeformed) position of the mesh. | ||
| */ | ||
| void init() override; | ||
|
|
||
| /** StvK elasticity potential, i.e. W(x) = 1/2 lambda Tr^2(e) + mu e:e */ | ||
| double getPotentialEnergy ( | ||
| const sofa::core::MechanicalParams * mparams, | ||
| const Data<sofa::type::vector<sofa::type::Vec3>> & d_x) const override; | ||
|
|
||
| /** Linear elasticity residual, i.e. R(x) = dW(x)/dE */ | ||
| void addForce( | ||
| const sofa::core::MechanicalParams * mparams, | ||
| Data<sofa::type::vector<sofa::type::Vec3>> & d_f, | ||
| const Data<sofa::type::vector<sofa::type::Vec3>>& d_x, | ||
| const Data<sofa::type::vector<sofa::type::Vec3>>& d_v) override; | ||
|
|
||
| /** Jacobian of the elastic residual, i.e. K(x) = dR(x)/dE */ | ||
| void addKToMatrix( | ||
| sofa::defaulttype::BaseMatrix * matrix, | ||
| double kFact, | ||
| unsigned int & offset) override; | ||
|
|
||
| /** Performs df = K*dx where K is the tangent stiffness matrix (see addKToMatrix) */ | ||
| void addDForce( | ||
| const sofa::core::MechanicalParams* mparams, | ||
| Data<sofa::type::vector<sofa::type::Vec3>> & d_df, | ||
| const Data<sofa::type::vector<sofa::type::Vec3>> & d_dx) override; | ||
|
|
||
| /** Draw the computational mesh as the simulation advance. Only for debug purposes. */ | ||
| void draw(const sofa::core::visual::VisualParams* vparams) override; | ||
|
|
||
| /** Used to automatically define a minimal view box for the GUI */ | ||
| void computeBBox(const sofa::core::ExecParams* params, bool onlyVisible) override; | ||
|
|
||
| private: | ||
| Data<double> d_youngModulus; | ||
| Data<double> d_poissonRatio; | ||
| Link<sofa::core::topology::BaseMeshTopology> d_topology_container; ///< Container of node indices per element | ||
| std::vector<std::array<GaussNode, Element::NumberOfGaussNode>> p_gauss_nodes; ///< Set of Gauss nodes per elements | ||
| }; |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,13 @@ | ||
| # CMake package configuration file for the plugin @PROJECT_NAME@ | ||
|
|
||
| @PACKAGE_GUARD@ | ||
| @PACKAGE_INIT@ | ||
|
|
||
| find_package(Sofa.Core REQUIRED) | ||
| find_package(Eigen3 REQUIRED) | ||
|
|
||
| if(NOT TARGET @PROJECT_NAME@) | ||
| include("${CMAKE_CURRENT_LIST_DIR}/@[email protected]") | ||
| endif() | ||
|
|
||
| check_required_components(@PROJECT_NAME@) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,43 @@ | ||
| #pragma once | ||
|
|
||
| #include <Eigen/Eigen> | ||
| #include <array> | ||
|
|
||
| struct Tetrahedron { | ||
| static constexpr auto NumberOfNodes = 4; | ||
| static constexpr auto NumberOfGaussNode = 1; | ||
|
|
||
| struct GaussNode { | ||
| Eigen::Vector3d position; | ||
| double weight; | ||
| }; | ||
|
|
||
| /// Shape function of each nodes evaluated at local coordinates (u, v, w) | ||
| static inline auto N(double u, double v, double w) -> Eigen::Matrix<double, NumberOfNodes, 1> { | ||
| return { | ||
| 1 - u - v - w, // Node 0 | ||
| u, // Node 1 | ||
| v, // Node 1 | ||
| w // Node 3 | ||
| }; | ||
| } | ||
|
|
||
| /// Derivatives of the shape function at each nodes w.r.t local coordinates and evaluated at (u, v, w) | ||
| static inline auto dN(double /*u*/, double /*v*/, double /*w*/) -> Eigen::Matrix<double, NumberOfNodes, 3> { | ||
| Eigen::Matrix<double, NumberOfNodes, 3> m; | ||
| // dL/du dL/dv dL/dw | ||
| m << -1, -1, -1, // Node 0 | ||
| 1, 0, 0, // Node 1 | ||
| 0, 1, 0, // Node 1 | ||
| 0, 0, 1; // Node 3 | ||
| return m; | ||
| } | ||
|
|
||
| /// Numerical integration points of the element | ||
| static inline auto gauss_nodes() -> const std::array<GaussNode, NumberOfGaussNode> & { | ||
| static const std::array<GaussNode, NumberOfGaussNode> gauss_nodes { | ||
| GaussNode {Eigen::Vector3d(1/4., 1/4., 1/4.), double(1/6.)} // Node 0 | ||
| }; | ||
| return gauss_nodes; | ||
| } | ||
| }; |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,23 @@ | ||
| <Node> | ||
| <RequiredPlugin pluginName="SofaSimpleForcefield SofaBaseMechanics SofaBaseTopology SofaSparseSolver SofaImplicitOdeSolver SofaTopologyMapping SofaBoundaryCondition SofaEngine" /> | ||
| <VisualStyle displayFlags="showForceFields showBehaviorModels" /> | ||
| <RegularGridTopology name="grid" min="-7.5 -7.5 0" max="7.5 7.5 80" n="9 9 21" /> | ||
|
|
||
| <StaticSolver newton_iterations="25" relative_correction_tolerance_threshold="1e-15" relative_residual_tolerance_threshold="1e-10" printLog="1" /> | ||
| <SparseLDLSolver template="CompressedRowSparseMatrixMat3x3d"/> | ||
|
|
||
| <MechanicalObject name="mo" src="@grid" /> | ||
| <TetrahedronSetTopologyContainer name="topology" /> | ||
| <TetrahedronSetTopologyModifier/> | ||
| <Hexa2TetraTopologicalMapping input="@grid" output="@topology" swapping="1" /> | ||
|
|
||
| <SVKElasticForcefield youngModulus="3000" poissonRatio="0.3" topology="@topology" /> | ||
|
|
||
| <BoxROI name="fixed_roi" box="-7.5 -7.5 -0.9 7.5 7.5 0.1" /> | ||
| <FixedConstraint indices="@fixed_roi.indices" /> | ||
|
|
||
| <BoxROI name="top_roi" box="-7.5 -7.5 79.9 7.5 7.5 80.1" /> | ||
| <TriangleSetGeometryAlgorithms /> | ||
| <TrianglePressureForceField pressure="0 -10 0" topology="@topology" triangleList="@top_roi.triangleIndices" showForces="1" /> | ||
|
|
||
| </Node> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,44 @@ | ||
| // Here are just several convenient functions to help user to know what contains the plugin | ||
|
|
||
| extern "C" { | ||
| void initExternalModule(); | ||
| const char* getModuleName(); | ||
| const char* getModuleVersion(); | ||
| const char* getModuleLicense(); | ||
| const char* getModuleDescription(); | ||
| const char* getModuleComponentList(); | ||
| } | ||
|
|
||
| void initExternalModule() | ||
| { | ||
| static bool first = true; | ||
| if (first) | ||
| { | ||
| first = false; | ||
| } | ||
| } | ||
|
|
||
| const char* getModuleName() | ||
| { | ||
| return "SofaSimpleForcefield"; | ||
| } | ||
|
|
||
| const char* getModuleVersion() | ||
| { | ||
| return "1.0"; | ||
| } | ||
|
|
||
| const char* getModuleLicense() | ||
| { | ||
| return "LGPL 2.1"; | ||
| } | ||
|
|
||
| const char* getModuleDescription() | ||
| { | ||
| return "Simple implementation of a Saint-Venant-Kirchhoff force field"; | ||
| } | ||
|
|
||
| const char* getModuleComponentList() | ||
| { | ||
| return "SVKElasticForcefield"; | ||
| } |