
![]()

Personal assistant robot that interacts with the human being on a physical and emotional level.
- What is this?
- Demo
- Requirements
- How to use
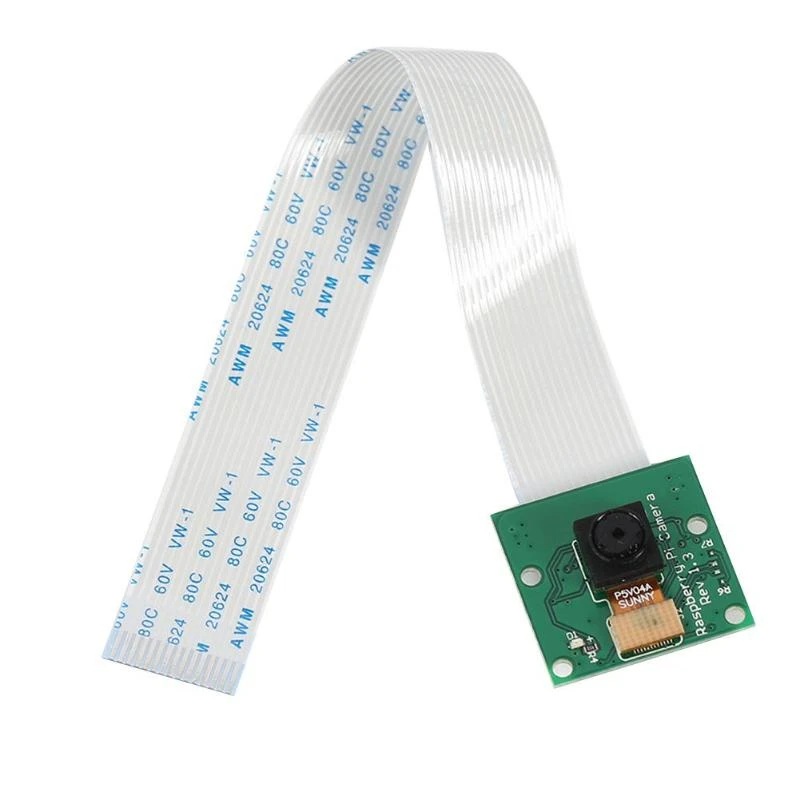
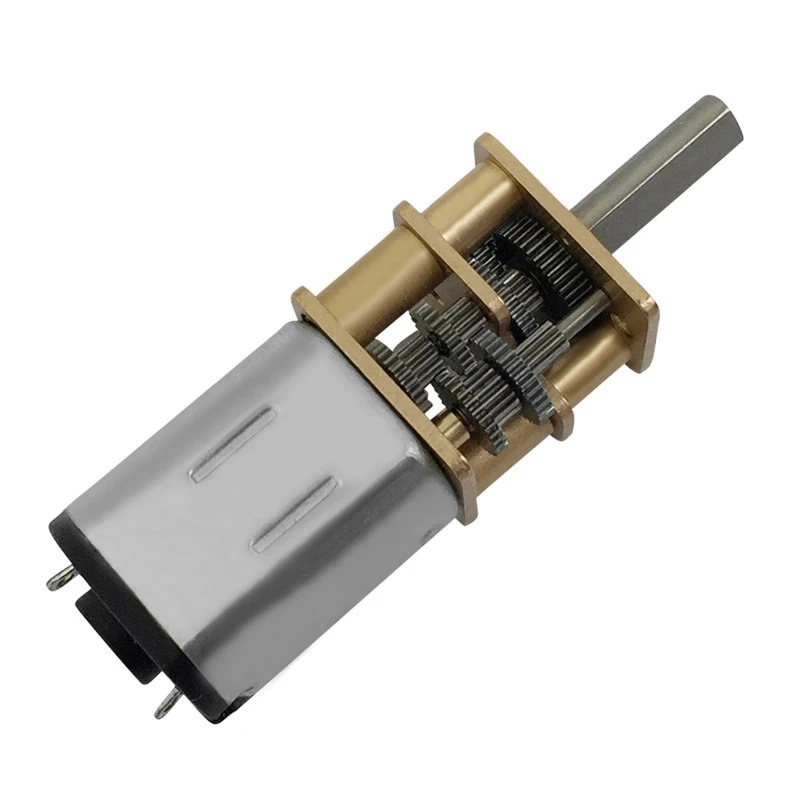
- Components
- Hardware Scheme
- Software Architecture
- Software Modules
- Eyes
- Arms
- Movements
- Proximity Sensors
- Command Voice
- Additional Implementations
- Built With
- License
- Use-case
- Amazing Contribution
- How to contribute
- Citing
- Support
- Authors
- Bibliography
This project seeks to create an autonomous robot completely focused on emotional interaction with the user. It will be carried out by means of a table assistant with already existing typical functionalities, but thanks to artificial intelligence you will be able to interact with it through voice and video and thus enhance robot-human interaction seeking the maximum fluidity possible.
We also believe that the aesthetic design of the robot is very important to be able to transmit emotions to the user, so it will be very well worked.
Another point that we want is that all software has to be open source, from deep learning models to used libraries. You do not need an internet connection to use most of its features.

For running each sample code:
- Clone this repo.
git clone https://github.com/juanmacaaz/Jetsy
- Go to the directory where the code is located.
cd Jesty
- Install the required libraries.
using pip :
pip install -r Requirements/requirements.txt
- Execute the following command to run the sample code.
python3 run.py
- Add star to this repo if you like it 😃.

|
|

|
|

|

|

|

|

|

|

|

|

|

|

|

|
















This project is under the MIT License - see the LICENSE file for details If this project helps your robotics project, please let us know with creating an issue.
In order to create new states you can follow these steps:
Note: that the second value of the tuple corresponds to the identifier of the new state created in step 1.
Any contribution is welcome!! Contact us via email. If you use this project's code for your academic work or in industry, we'd love to hear from you as well; feel free to reach out to the developers directly.
| |||



