This code accompanies the paper Deep Spectral Methods: A Surprisingly Strong Baseline for Unsupervised Semantic Segmentation and Localization.
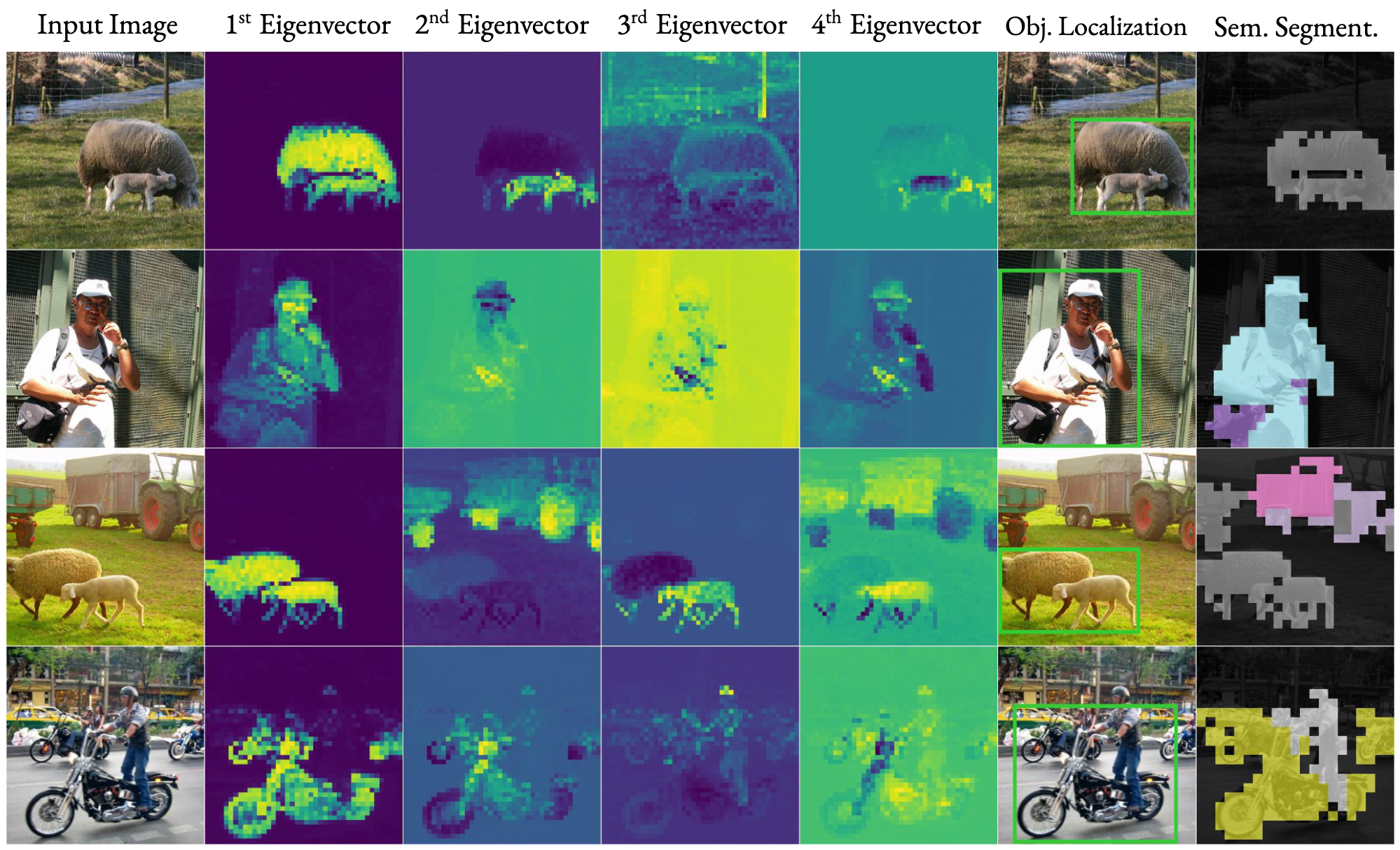
Unsupervised localization and segmentation are long-standing computer vision challenges that involve decomposing an image into semantically-meaningful segments without any labeled data. These tasks are particularly interesting in an unsupervised setting due to the difficulty and cost of obtaining dense image annotations, but existing unsupervised approaches struggle with complex scenes containing multiple objects. Differently from existing methods, which are purely based on deep learning, we take inspiration from traditional spectral segmentation methods by reframing image decomposition as a graph partitioning problem. Specifically, we examine the eigenvectors of the Laplacian of a feature affinity matrix from self-supervised networks. We find that these eigenvectors already decompose an image into meaningful segments, and can be readily used to localize objects in a scene. Furthermore, by clustering the features associated with these segments across a dataset, we can obtain well-delineated, nameable regions, i.e. semantic segmentations. Experiments on complex datasets (Pascal VOC, MS-COCO) demonstrate that our simple spectral method outperforms the state-of-the-art in unsupervised localization and segmentation by a significant margin. Furthermore, our method can be readily used for a variety of complex image editing tasks, such as background removal and compositing.
Please check out our interactive demo on Huggingface Spaces! The demo enables you to upload an image and outputs the eigenvectors extracted by our method. It does not perform the downstream tasks in our paper (e.g. semantic segmentation), but it should give you some intuition for how you might use utilize our method for your own research/use-case.
The minimal set of dependencies is listed in requirements.txt.
The data preparation process simply consists of collecting your images into a single folder. Here, we describe the process for Pascal VOC 2012. Pascal VOC 2007 and MS-COCO are similar.
Download the images into a single folder. Then create a text file where each line contains the name of an image file. For example, here is our initial data layout:
data
└── VOC2012
├── images
│ └── {image_id}.jpg
└── lists
└── images.txt
We first extract features from images and stores these into files. We then extract eigenvectors from these features. Once we have the eigenvectors, we can perform downstream tasks such as object segmentation and object localization.
The primary script for this extraction process is extract.py in the extract/ directory. All functions in extract.py have helpful docstrings with example usage.
First, we extract features from our images and save them to .pth files.
With regard to models, our repository currently only supports DINO, but other models are easy to add (see the get_model function in extract_utils.py). The DINO model is downloaded automatically using torch.hub.
Here is an example using dino_vits16:
python extract.py extract_features \
--images_list "./data/VOC2012/lists/images.txt" \
--images_root "./data/VOC2012/images" \
--output_dir "./data/VOC2012/features/dino_vits16" \
--model_name dino_vits16 \
--batch_size 1Second, we extract eigenvectors from our features and save them to .pth files.
Here, we extract the top K=5 eigenvectors of the Laplacian matrix of our features:
python extract.py extract_eigs \
--images_root "./data/VOC2012/images" \
--features_dir "./data/VOC2012/features/dino_vits16" \
--which_matrix "laplacian" \
--output_dir "./data/VOC2012/eigs/laplacian" \
--K 5The final data structure after extracting eigenvectors looks like:
data
├── VOC2012
│ ├── eigs
│ │ └── {outpur_dir_name}
│ │ └── {image_id}.pth
│ ├── features
│ │ └── {model_name}
│ │ └── {image_id}.pth
│ ├── images
│ │ └── {image_id}.jpg
│ └── lists
│ └── images.txt
└── VOC2007
└── ...
At this point, you are ready to use the eigenvectors for downstream tasks such as object localization, object segmentation, and semantic segmentation.
First, clone the dino repo inside this project root (or symlink it).
git clone https://github.com/facebookresearch/dinoRun the steps above to save your eigenvectors inside a directory, which we will now call ${EIGS_DIR}. You can then move to the object-localization directory and evaluate object localization with:
python main.py \
--eigenseg \
--precomputed_eigs_dir ${EIGS_DIR} \
--dataset VOC12 \
--name "example_eigs"To perform object segmentation (i.e. single-region segmentations), you first extract features and eigenvectors (as described above). You then extract coarse (i.e. patch-level) single-region segmentations from the eigenvectors, and then turn these into high-resolution segmentations using a CRF.
Below, we will give example commands for the CUB bird dataset (CUB_200_2011). To download this dataset, as well as the three other object segmentation datasets used in our paper, you can follow the instructions in unsupervised-image-segmentation. Then make sure to specify the data_root parameter in the config/eval.yaml.
For example:
# Example dataset
DATASET=CUB_200_2011
# Features
python extract.py extract_features \
--images_list "./data/object-segmentation/${DATASET}/lists/images.txt" \
--images_root "./data/object-segmentation/${DATASET}/images" \
--output_dir "./data/object-segmentation/${DATASET}/features/dino_vits16" \
--model_name dino_vits16 \
--batch_size 1
# Eigenvectors
python extract.py extract_eigs \
--images_root "./data/object-segmentation/${DATASET}/images" \
--features_dir "./data/object-segmentation/${DATASET}/features/dino_vits16/" \
--which_matrix "laplacian" \
--output_dir "./data/object-segmentation/${DATASET}/eigs/laplacian_dino_vits16" \
--K 2 \
# Extract single-region segmentatiosn
python extract.py extract_single_region_segmentations \
--features_dir "./data/object-segmentation/${DATASET}/features/dino_vits16" \
--eigs_dir "./data/object-segmentation/${DATASET}/eigs/laplacian_dino_vits16" \
--output_dir "./data/object-segmentation/${DATASET}/single_region_segmentation/patches/laplacian_dino_vits16"
# With CRF
# Optionally, you can also use `--multiprocessing 64` to speed up computation by running on 64 processes
python extract.py extract_crf_segmentations \
--images_list "./data/object-segmentation/${DATASET}/lists/images.txt" \
--images_root "./data/object-segmentation/${DATASET}/images" \
--segmentations_dir "./data/object-segmentation/${DATASET}/single_region_segmentation/patches/laplacian_dino_vits16" \
--output_dir "./data/object-segmentation/${DATASET}/single_region_segmentation/crf/laplacian_dino_vits16" \
--downsample_factor 16 \
--num_classes 2After this extraction process, you should have a file with full-resolution segmentations. Then to evaluate on object segmentation, you can move into the object-segmentation directory and run python main.py. For example:
python main.py predictions.root="./data/object-segmentation" predictions.run="single_region_segmentation/crf/laplacian_dino_vits16"By default, this assumes that all four object segmentations are available. To run on a custom dataset or only a subset of these datasets, simply edit configs/eval.yaml.
Also, if you want to visualize your segmentations, you should be able to use streamlit run extract.py vis_segmentations (after installing streamlit).
For semantic segmentation, we provide full instructions in the semantic-segmentation subfolder.
L. M. K. acknowledges the generous support of the Rhodes Trust. C. R. is supported by Innovate UK (project 71653) on behalf of UK Research and Innovation (UKRI) and by the European Research Council (ERC) IDIU-638009. I. L. and A. V. are supported by the VisualAI EPSRC programme grant (EP/T028572/1).
We would like to acknowledge LOST (paper and code), whose code we adapt for our object localization experiments. If you are interested in object localization, we suggest checking out their work!
@inproceedings{
melaskyriazi2022deep,
title={Deep Spectral Methods: A Surprisingly Strong Baseline for Unsupervised Semantic Segmentation and Localization}
author={Luke Melas-Kyriazi and Christian Rupprecht and Iro Laina and Andrea Vedaldi}
year={2022}
booktitle={CVPR}
}