This repository contains a preconfigured workspace for development of the Pilsbot platform. The branch foxy includes all needed packages for desktop development and simulation. The branch foxy-jetson contains everything needed on the real hardware platform. Hence, it slightly differs from the main branch, since the custom build does currently not include any binary packages.
In the future this might be fused into one branch, but this is currently not possible because the Jetson Nano officially doesn't support anything newer than Ubuntu 18.04.
You should already have Docker and VSCode with the remote containers plugin installed on your system.
Clone the repository to a folder of your choice with
git clone https://github.com/pilsbot/pilsbot_vscode_ws.git
or via ssh
git clone [email protected]:pilsbot/pilsbot_vscode_ws.git
Now that you've cloned your repo onto your computer, you can open it in VSCode (File->Open Folder).
When you open it for the first time, you should see a little popup that asks you if you would like to open it in a container. Say yes!
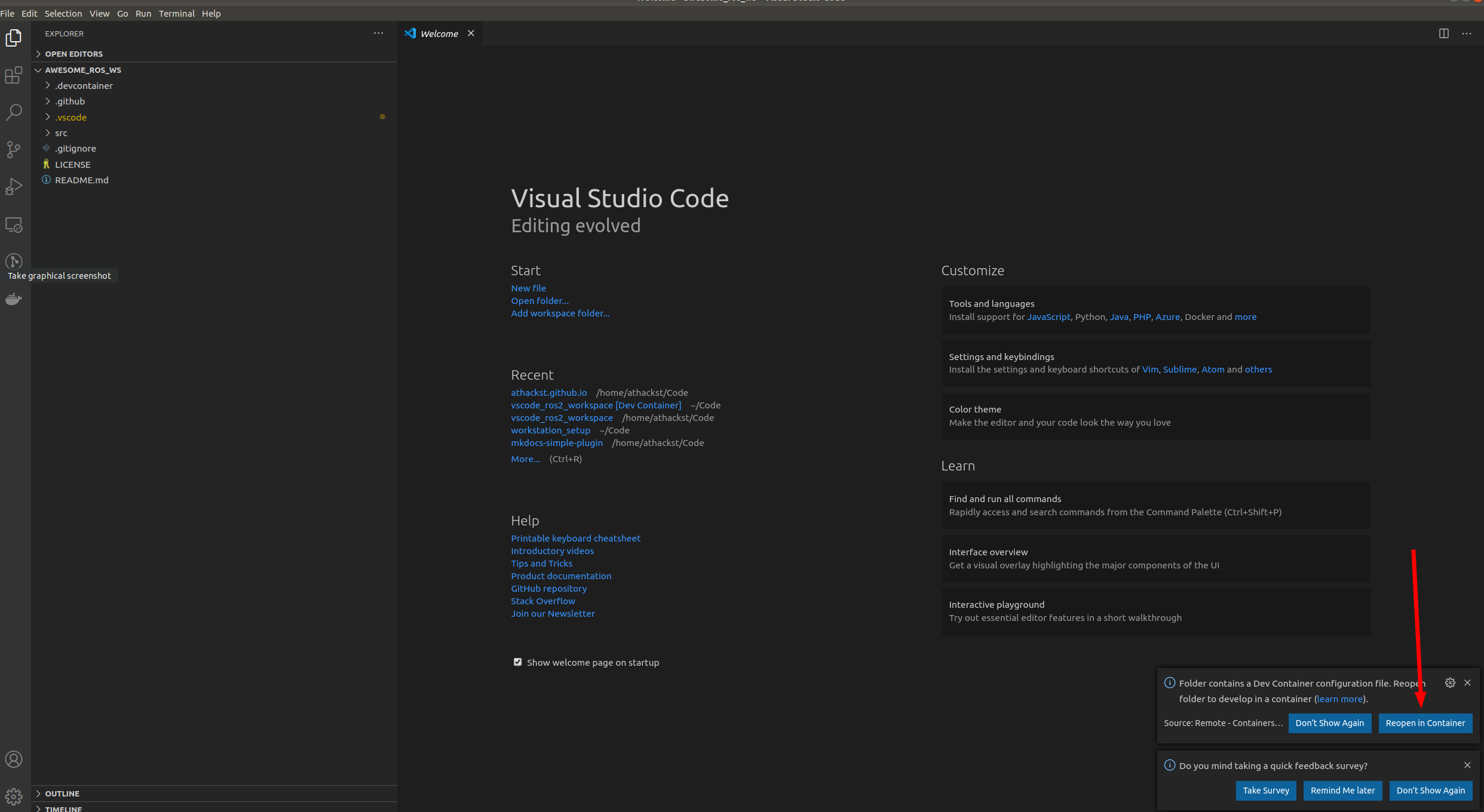
If you don't see the pop-up, click on the little green square in the bottom left corner, which should bring up the container dialog
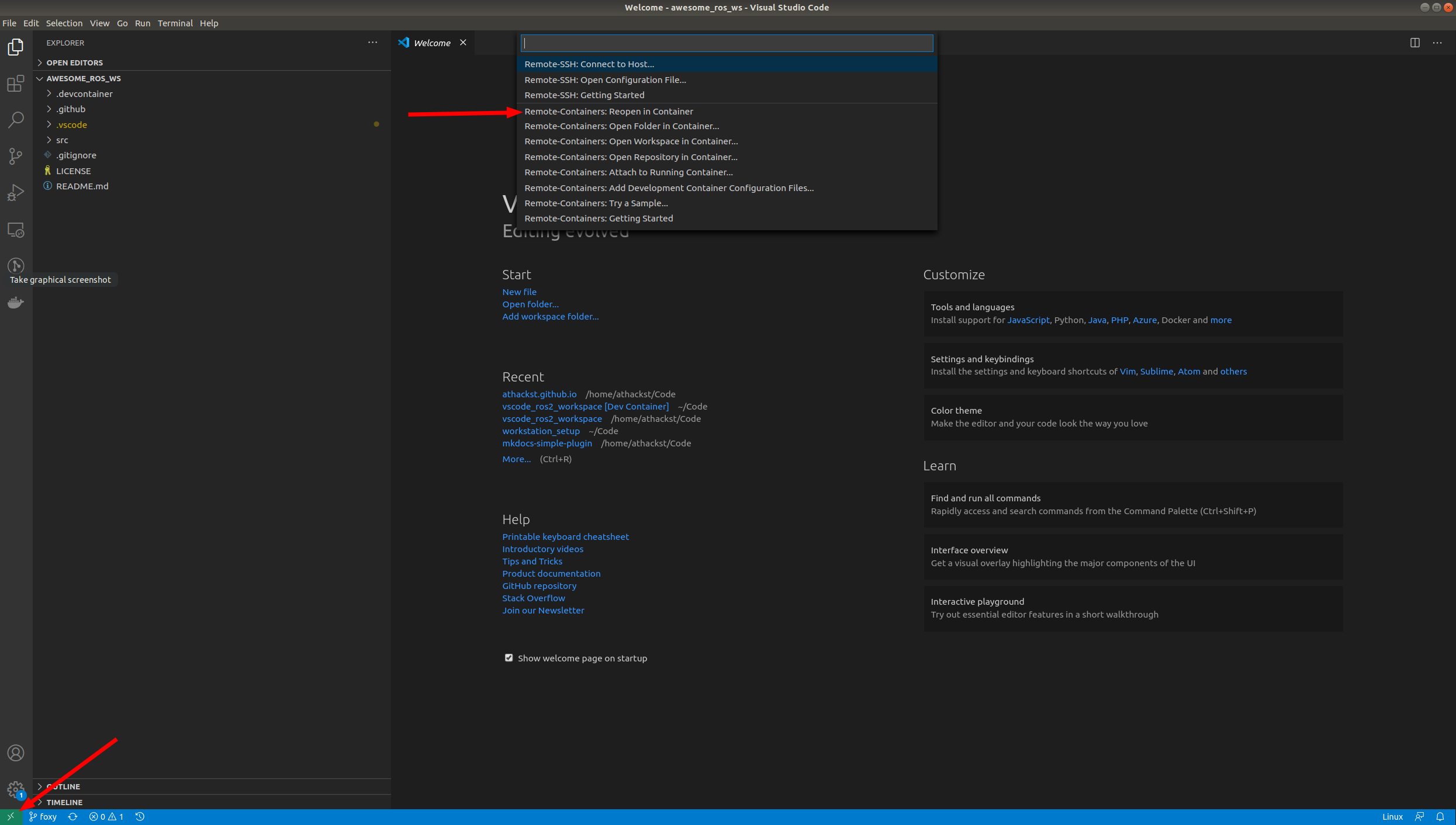
In the dialog, select "Remote Containers: Reopen in container"
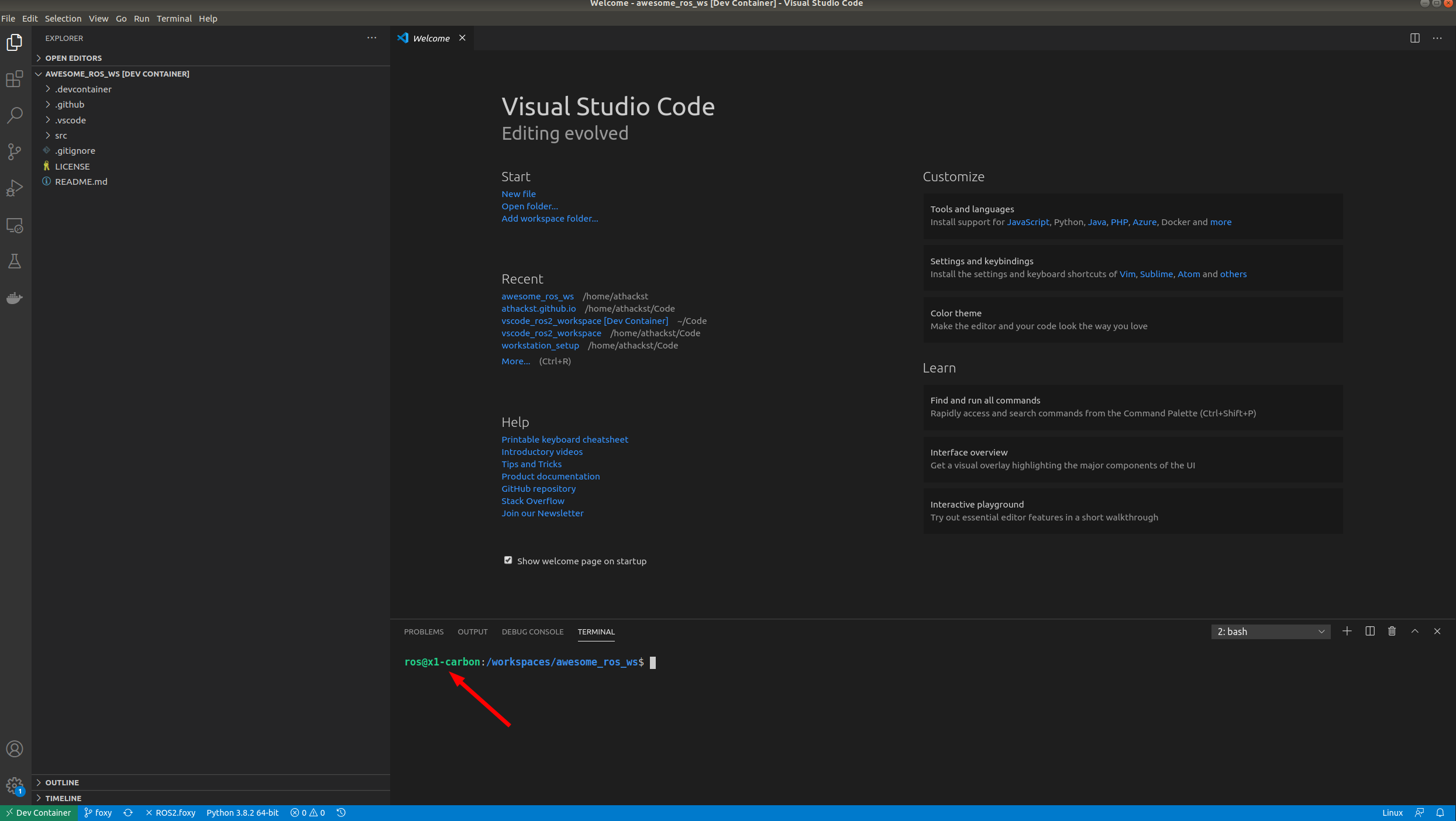
VSCode will build the dockerfile inside of .devcontainer for you. If you open a terminal inside VSCode (Terminal->New Terminal), you should see that your username has been changed to ros, and the bottom left green corner should say "Dev Container"
- Specify the repositories you want to include in your workspace in
src/ros2.repos. import the contentsTerminal->Run Task..->import from workspace file - Install dependencies
Terminal->Run Task..->install dependencies - Run the build task with
Ctrl+Shift+B
To test a successfull configuarion and build of the workspace you can start the Pilsbot simulation. You have two options to do so.
- Open a terminal in your workspace and type:
ros2 launch pilsbot_simulation pilsbot.launch.py - Press
Ctrl+Shift+Psearch forROS: Run a ROS launch file (roslaunch), type the package namepilsbot_simulation, choose a launch file e.g.pilsbot.launch.pyand pressEnteragain to skip defining additional launch arguments.
Congratulations, you now have a setup workspace to develop on the Pilsbot platform! 🎉
If any issues occur during the setup process, do not hesitate to open an issue, so we can fix the problem as soon as possible.
- all packages added to the workspace should use
https. If you have a Github account logged in your VSCode installation, you can easily push without the need for password authentication. You will be asked to acknowledge your login once via your browser and you're good to go.