As part of a graded project for Engineering and Principles and Practice II
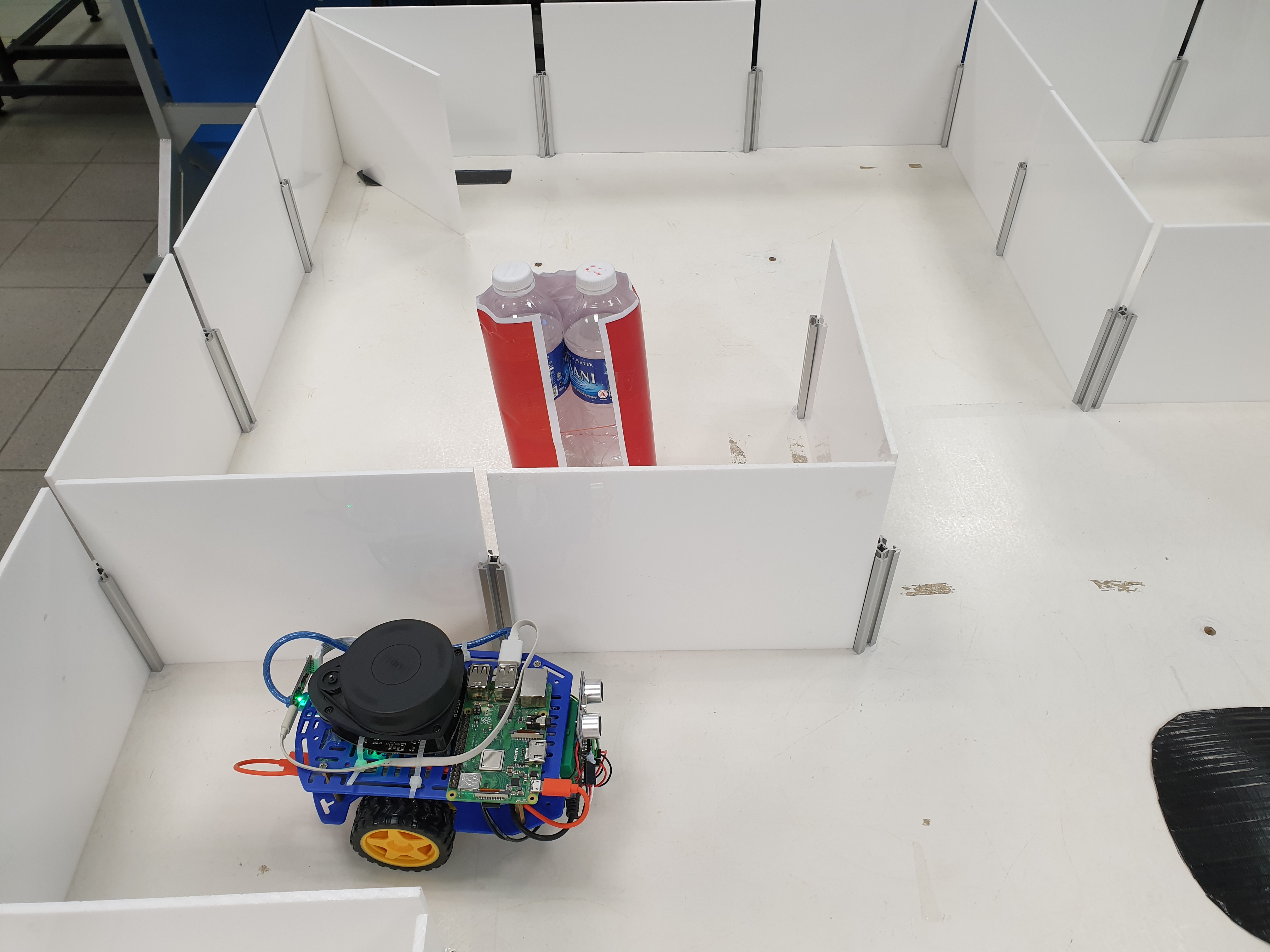
The objective of the Alex is to be a robot with search and rescue functionalities. Alex was required to be tele-operated and navigated from our laptops, while mapping out a simulated environment within a 3m^2 table.

Our Alex was made up of the following components:
| Aspect | Component | Function |
|---|---|---|
| Movement | 3x Wheel | Moves Alex to its desired location |
| Movement | 2x Motor | Transforms the electrical energy to mechanical energy to power the wheel to rotate |
| Movement | Dual Motor Driver Carriers (DRV8833) |
Contains 2 H-bridges, receiving the difference in PWM inputs to drive the motors from the AA batteries with the desired parity |
| Measurement | 2x Wheel Encoder |
Calculates the number of rotations performed by the motor, which can be used to measure distance traveled |
| Measurement | Ultrasonic Sensor | Uses pulses of ultrasonic sound waves to measure the distance between obstacles and the rear of Alex |
| Mapping | LIDAR (RPLIDAR A1) |
Provides coordinates of obstacles detected which then can be used to map the surroundings of Alex |
| Power Source | 4x AA Battery with Holder |
Provides electrical energy to power the motors |
| Power Source | Power Bank | Provides electrical energy to power the Raspberry Pi, Arduino Uno and LIDAR |
| Communication | Arduino Uno | Receives data packets of commands from the Raspberry Pi, to perform measurements of Alex, and to move Alex to its desired location |
| Communication | Raspberry Pi | Provides communication to the Arduino Uno to navigate Alex around its surroundings, provides communication with our personal laptops to be remotely controlled, connects the LIDAR to a shared network with our personal laptops, so it can send over the coordinates which can then be used to map the surroundings |
| Miscellaneous | Breadboard | To hold and allow for the connections of the Dual Motor Driver Carriers, Motors, Wheel Encoders and Ultrasonic Sensors |
| Miscellaneous | Wires | Provides connections between the Arduino Uno, Dual Motor Driver Carriers, Motors, Wheel Encoders and Ultrasonic Sensors |
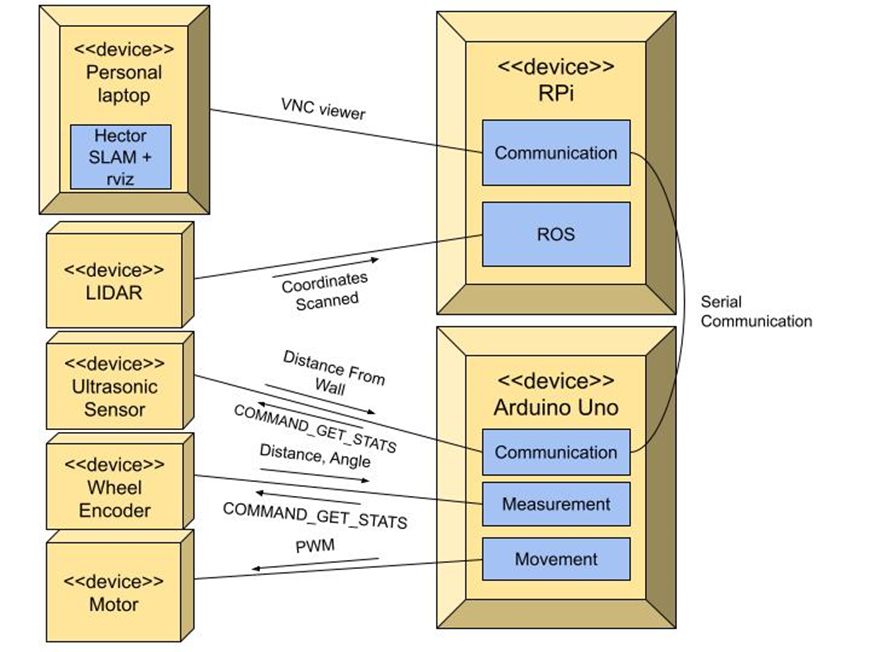
The following is the breakdown of the implementation of Alex and how each
component works and is integrated with one another:
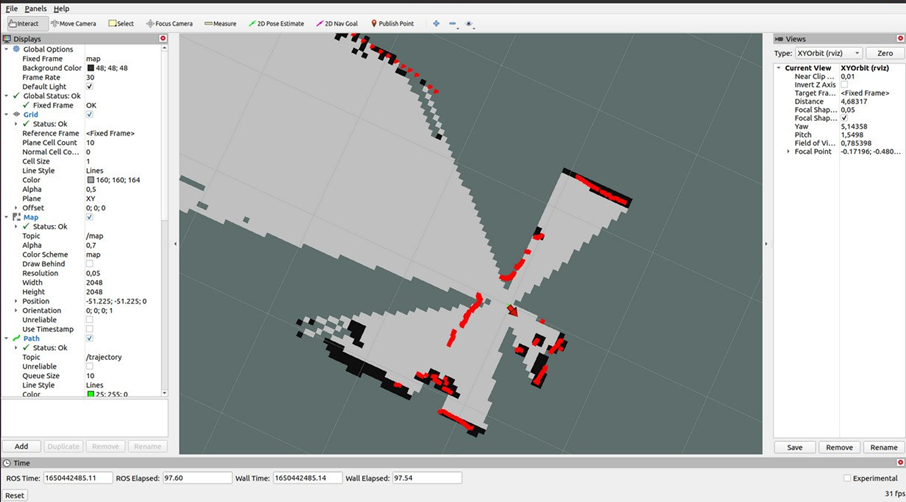
The following is an image of the display map that can be seen from our laptop: