06. Detalles Tecnicos
6.- DETALLES TÉCNICOS
A continuación describiremos los elementos que integran el kit educativo CatSat1, hablaremos de sus características técnicas y cómo se integran en los subsistemas que componen la misión.
6.1 Componentes electrónicos y sensores
Lista detallada de componentes electrónicos, sensores y módulos que integran el CatSat:
| Cantidad | Descripción | Número de parte |
|---|---|---|
| 1 | PCB Tarjeta Principal. | S/N |
| 1 | PCB Tarjeta de Sensores | S/N |
| 1 | PCB Tarjeta de GPS y Telecomunicaciones | S/N |
| 1 | Arduino Pro Mini 3.3v. | S/N |
| 1 | Sensor de temperatura y humedad. | DHT22 |
| 1 | Módulo múltiple; acelerómetro, barómetro, giroscopio, magnetómetro. | GY-87 |
| 1 | Módulo GPS. | L80 |
| 1 | Módulo de comunicacion LoRA. | RFM95 |
| 1 | Antena omnidireccional de 1/2 onda. | S/N |
| 1 | Batería ion-litio 3.7v, 2600 mA. | S/N |
| 1 | Modulo cargador de bateria | Modulo TP4056 |
| 1 | Globo meteorologico. | S/N |
| 1 | Capacitor 10uf | S/N |
| 2 | Resistencias (10K Y 12K) | S/N |
| 1 | Kit Carcasa y Tapas PVC | S/N |
| 1 | Kit de Tornillos (3/16" de diametro) | S/N |
| 1 | Conector SMA para antena | S/N |
| 1 | Diodo rectificador | 1N4004 |
| 3 | Capacitores ceramicos | 104 |
| 1 | Kit de Pines y headers | S/N |
| 1 | Jumper | S/N |
| *Opcional | Cámara Mini HD 720 5 horas de grabación. | T186 |
6.2 Especificaciones y requerimientos
| PRECAUCIÓN: La mayoría de los componentes del CatSat están preparados para trabajar solo a 3.3V, si usted piensa usar una fuente externa o ajena a la que incluye el kit por favor revisar voltaje antes de conectar. |
|---|
Las hojas técnicas de cada componente nos proveen información suficiente para trabajar con/ todos los elementos de nuestro CanSat, a continuación te dejamos los enlaces a cada una de ellas.
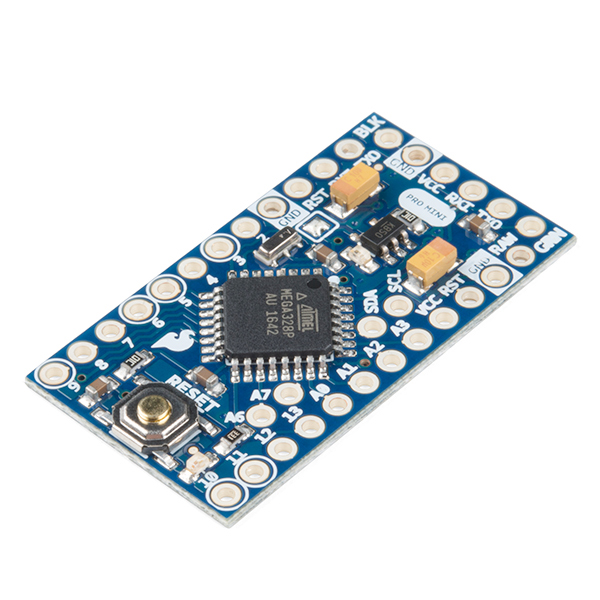
6.2.1.- Arduino Pro Mini 328 - 3.3V/8MHz
Se trata de un Arduino muy similar al Arduino UNO R3 con enfoque minimalista a 3.3V a una frecuencia de trabajo de 8 Mhz, excelente para mantener el pequeño tamaño del CatSat, podríamos decir que es la “computadora de vuelo” de nuestro pequeño satélite.
Getting Started [2]
Datasheet [3] [4]
6.2.2.- Convertidor USB-Serial FTDI
Este es un dispositivo de comunicación serial es necesario para la programación, comunicación y depuración del Arduino Pro Mini via USB con la computadora (PC).
Características:
- Voltaje: 3.3-5V
- Comunicación: Serial (UART)
PRECAUCIÓN: Asegurarse que el interruptor esté siempre en 3.3V cuando se trabaja con el CatSat
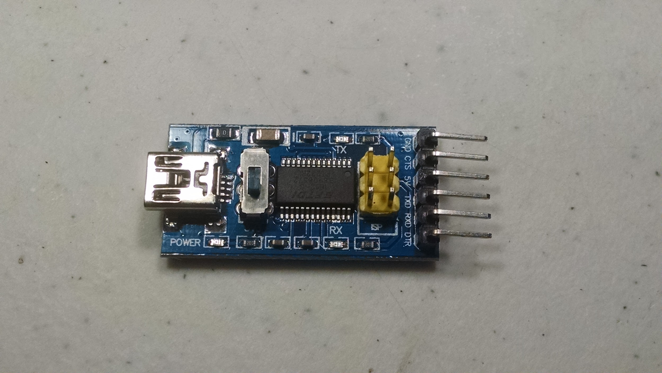
Figura 1: FTDI switch en 3.3V
6.2.3.- Sensor DHT22
El DHT 22 es un sensor digital de temperatura y humedad de bajo costo. Se utiliza un sensor de humedad capacitivo y un termistor para medir el aire circundante, y arroja una señal digital en el pin de datos (no son necesarios pines de entrada analógica). Este sensor puede obtener nuevos datos una vez cada 2 segundos.
Características:
- Humedad: 0 a 100% (relativa)
- Temperatura: -40 a 80 ºC
- Voltaje: 3.3-6V
- Comunicación: Digital
- Frecuencia de lectura: 0.5Hz

Datasheet [5]
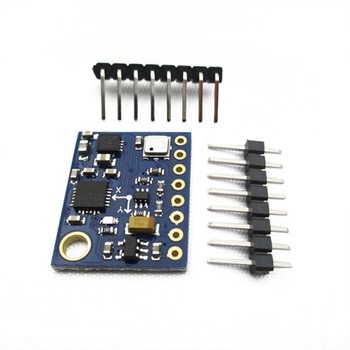
6.2.4.- Sensor GY-87
Módulo que integra varios sensores, llamada unidad de medición inercial (IMU) cuenta con:
MPU6050
- Acelerómetro digital de 3 ejes (sensor de movimiento o caída), medición hasta ±16g
- Giroscopio digital de 3 ejes (sensor de inclinación o ángulo), medición hasta ±2000 º/s
HCM5883L
- Magnetómetro digital de 3 ejes (brújula digital), medición hasta ±8 Gauss
BMP180
- Barómetro de presión absoluta (sensor de presión atmosférica digital), medición de 300 hPa a 1100 hPa.
Características:
- Voltaje: 3.3-5V
- Comunicación: I2C
Datasheet [6][7][8]
6.2.5.- Módulo GPS L80
El GPS L80 es un circuito integrado de 15X15X4 mm con antena incluìda de alta sensibilidad con opción a antena externa, cuenta con interfaz UART configurable. Protocolo NMEA.
- Voltaje: 3- 4.3V
- Comunicación: Serial (UART), 9600 baudios
- 66 canales adquisicion, 22 ganeles de tracking
- Modo Balon para altas altitudes arriba de 80km

Para saber más acerca de sistemas de Sistemas de navegacion por satelite (GNSS) consulte [9]
Acerca del protocolo NMEA consulte [10]
DataSheet [11]
Documentación disponible en [12]
6.2.6.- Módulo RFM95
El transceptor RFM95 cuenta con un modem de largo alcance LoRa, el cual transmite a una frecuencia de 915 Mhz , gracias a la técnica de modulación “LoRa” el transceptor RFM95 alcanza una sensibilidad muy alta usando componentes electrónicos de bajo costo, además de inmunidad alta a la interferencia, mientras que minimiza el consumo de corriente.
Seleccionamos este módulo por su bajo costo, sensibilidad de recepción y potencia de transmisión logrando comunicación hasta por 22Km en tierra y 30 en la atmósfera, entre nodo y nodo.

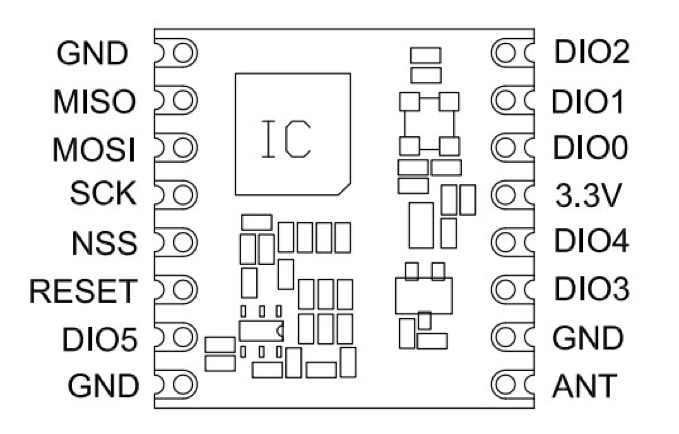
Figura 2: Pines de conexión módulo Lora
- Características:
- Voltaje: 2.4-3.7V
- Comunicación: SPI

DataSheet[13]
6.2.7.- Antena Dipolo omnidireccional 915 Mhz
La antena omnidireccional incluida en el kit es una antena tipo dipolo la cual es empleada para transmitir o recibir ondas de radiofrecuencia. Cuenta con un conector SMA macho, está diseñada para transmitir a una frecuencia de 915mhz y es capaz de transmitir a cualquier dirección más se recomienda la transmisión con la antena en horizontal.
Características:
- Ganancia de 4dBi
- Potencia maxima 1w
- Largo de antena 16.9 cm (¼ de onda de 915 mhz)
- Impedancia 50 ohms
DataSheet [14]

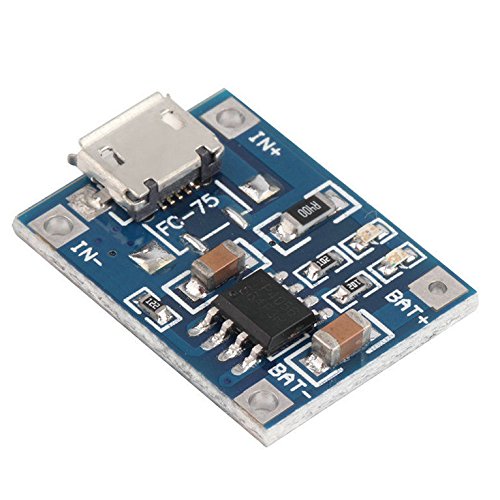
6.2.8.- Cargador bateria Lipo
El TP4056 es un completo cargador de baterías tipo Li-lon, cuenta con dos leds para indicar el estado de cargando y carga completa.
Características:
- Corriente de carga: 1A adjustable
- Voltaje de Entrada: 4.5V-5.5V
- Voltaje de carga completa: 4.2V
- Indicador de Carga: Led rojo Red cargando, led verde carga completa
DataSheet [15]
6.2.9.- Batería Lon-Litio
Una batería recargable tipo Lipo, en pruebas tiene una duración de hasta 6 hrs. PRECAUCIÓN: No perforar, calentar o colocar a altas presiones, flameable.
Características:
- Voltaje: 3.7V
- Corriente: 2600 mAh
- Voltaje de carga completa: 4.2V
- Temperatura mínima de trabajo: - 50ºC
Datasheet [15]
6.2.10.- Globo atmosférico
Utilizado como lanzador, el globo de latex de 350gr, permite elevar una carga de hasta 500grs asegurando una altura para que reviente a 22,000mts. lo que permitirá que el dispositivo no se desplace demasiado en su ascenso y descenso
Características:
- Peso: 350gr
- Material: Latex
6.2.11.- Cámara (opcional)
Esta cámara con su pequeño tamaño te ayudará a grabar cada momento de la misión desde el despegue hasta la recuperación del dispositivo.
Características:
Modelo: T186
- Full HD 1080, independencia de hasta 2 hs. en video
- Full HD 720, independencia de hasta 5 hrs. en video
- Soporta memoria SD de hasta 32 GB
- Batería 1800mAh, independencia de hasta 17 hrs

Referencia manual camara [16]
6.3.- Diagramas de la PCB
El CatSat1 está diseñado de tal manera que puedas colocar una tarjeta encima de otra en cualquier orden y trabajar de forma normal, esta seccion encontraras los diagramas de las conexiones internas que te ayudarán a comprender de una mejor manera su funcionamiento.
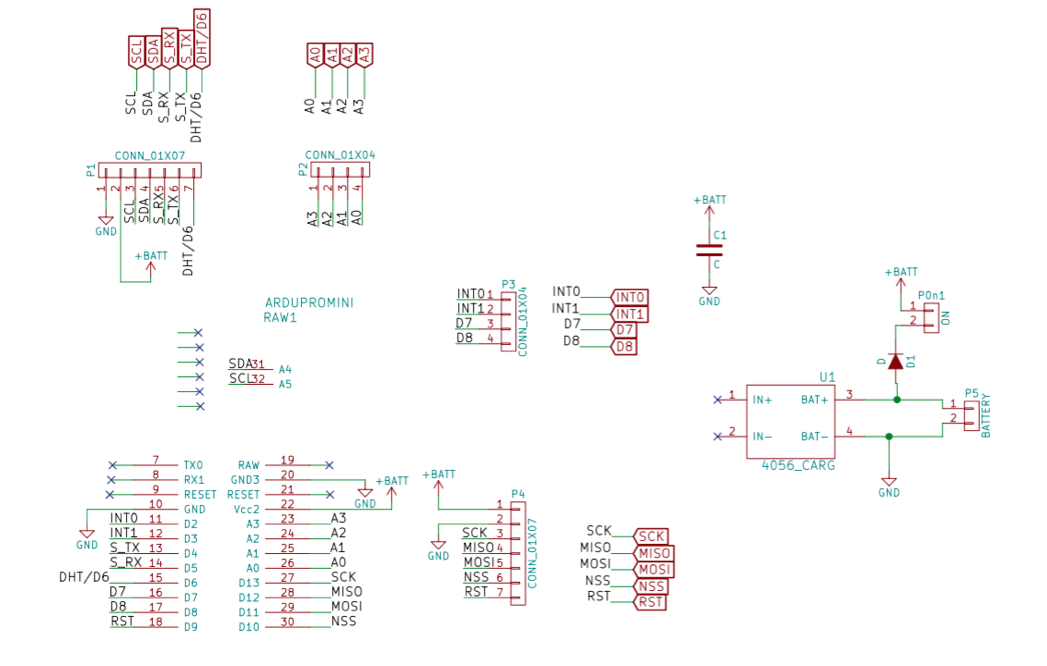 Figura 3: Esquemático
Figura 3: Esquemático
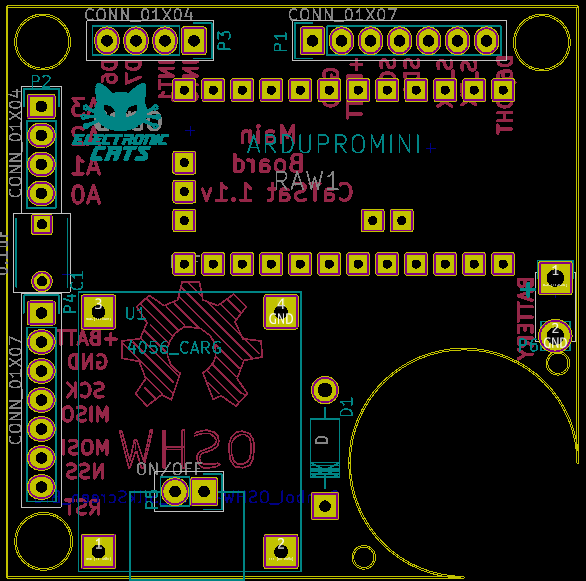 Figura 4: Main Board
Figura 4: Main Board
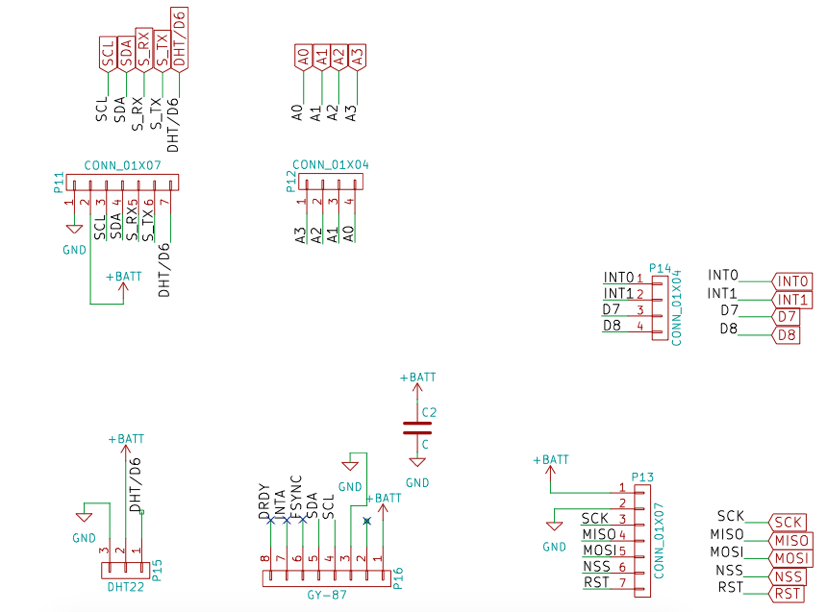 Figura 5: Esquemático tarjeta sensores
Figura 5: Esquemático tarjeta sensores
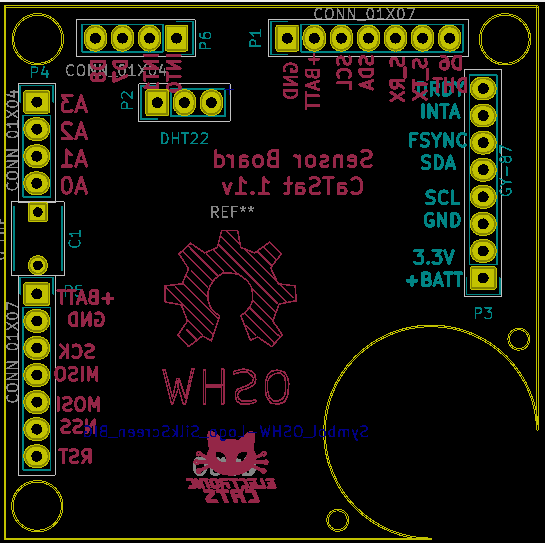 Figura 6: Sensor Board
Figura 6: Sensor Board
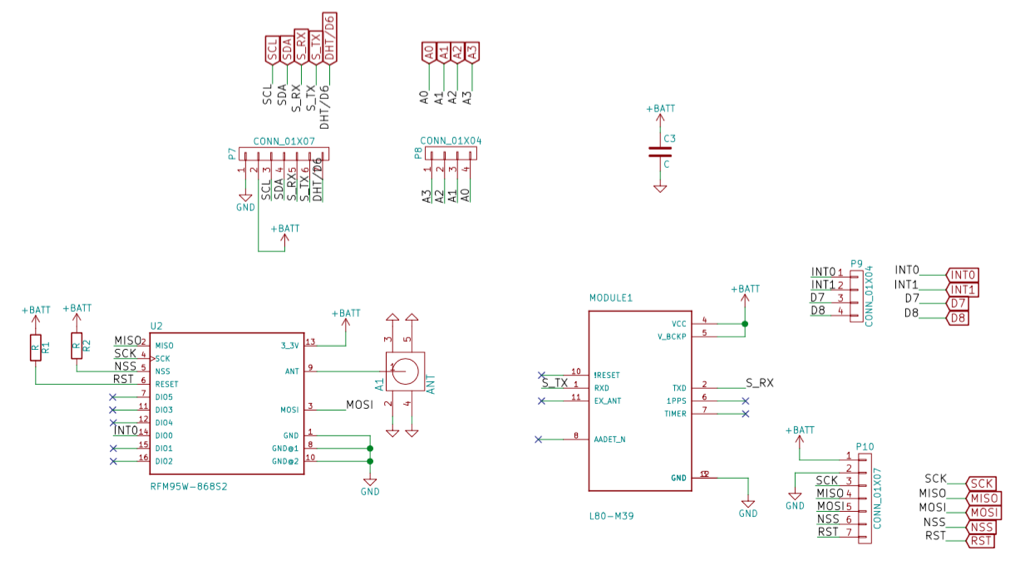 Figura 7: Esquemático Telemetría
Figura 7: Esquemático Telemetría
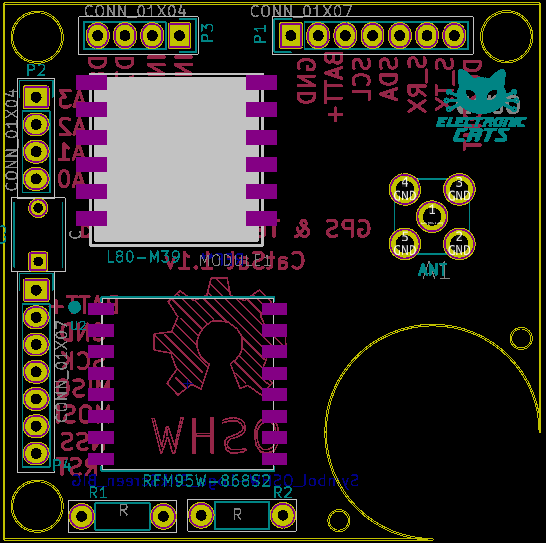 Figura 8: Telemetry Board
Figura 8: Telemetry Board
6.4.- Programa de control
El código fuente del programa de control se encuentra disponible en GitHub,el cual, tiene como objetivo configuración básica y la puesta en marcha del sistema, podrás modificar dicho código si así se requiere dependiendo las características de la misión. A continuación se muestra el diagrama de flujo del código:
Figura 9: Diagrama de flujo
6.5.- Metodología de ensamblado
Una vez que has entendido cómo funciona tu CanSat es momento de ensamblarlo. El CanSat se compone principalmente de 3 placas electrónicas:
-
Principal; que contiene el procesador o computadora de vuelo y el módulo para controlar la energía al momento de cargar la batería.
-
Sensores; que contiene los componentes para captar información como temperatura, humedad y posicionamiento en X, Y, Z.
-
Comunicaciones (o telemetría): la cual contiene el módulo GPS y el módulo de transmisión por radiofrecuencia el cual envía y recibe datos.
Para el fácil ensamblado del CatSat te recomendamos separes piezas por placas electrónicas de esta manera:
- Placa principal
- 2 x Tira de 7 pines hembra
- 2 x Tira de 4 pines hembra
- 1 x Tira de 2 pines macho en ángulo
- 1 x Arduino mini pro
- 1 x Cargador LiPo
- 1 x Diodo
- 1 x Capacitor 10μF
- Placa de sensores
- 2 x Tira de 7 pines hembra extra largos
- 2 x Tira de 4 pines hembra extra largos
- 1 x Sensor DHT22
- 1 x Sensor GY-87
- 1 x Capacitor 10μF
- Placa de comunicación
- 2 x Tira de 7 pines hembra extra largos
- 2 x Tira de 4 pines hembra extra largos
- 1 x Módulo GPS L-80
- 1 x Módulo RFM95
- 2 x Resistencias 10K ohms
- 1 x Conector hembra sma
6.6.- Metodología de soldado
Para facilitar el proceso de soldado, te recomendamos que sigas esta lista de orden de soldado de tus piezas
- Placa principal
- Capacitor ( C2 )
- Tira de 2 pines ( ON ) *En cara posterior
- Diodo ( D1 )
- Cargador LiPo ( U1 )
- Arduino Mini Pro (ARDUPROMINI)
- Tiras de 7 pines (P1, P13)
- Tiras de 4 pines (P8, P14)
- Soldar un cable (entre el negativo de la batería y el pin 20 (GND) del arduino)
- Placa de sensores
- Capacitor ( C1 )
- GY-87 ( P16 )
- DHT22 ( P15 )
- Tiras de 7 pines extra largos (P11, P10)
- Tiras de 4 pines extra largos (P2, P3)
- Placa de comunicación
- Módulo GPS ( L80-M39 )
- Módulo RFM95 (U2)
- Capacitor ( C3 )
- Resistencias ( R1, R2 )
- Conector antena (ANT)
- Tiras de 7 pines extra largos (P4, P7)
- Tiras de 4 pines extra largos (P12, P9)
6.7.- Integración del CatSat
Una vez soldado todo el CatSat es hora de unir todo, la integración del CatSat es muy sencilla ya que lo único que tienes que hacer es conectar sobre la placa principal la placa de sensores, pin con pin no debe sobrar ninguno, hecho esto, tendrás que poner la placa de comunicación sobre la placa de sensores que ya está sobre la principal, integrando así todo el CatSat