Coordinate Transform #6
Assignees


Labels
odcl
Object Detection, Classification, and Localization
Comments
|
this was fixed in #9 but I want to review before closing |
|
Added 714a793 But leaving open pending integration. |
|
Since this isn't integrated yet, I'm going to move it to an unspecified (later) release. |
|
@dangthanhan507 Looks good. Yeah, that is intentional, since we want as much surface area in the python package rather than in the ROS codebase. The merging of attitude data and object coordinate data will have to happen in #54 |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
We need to transform the coordinate system from image coordinates to "world" coordinates. We use this by leveraging the information that we know about the system:
We need to compute the transform between the camera coordinates to world coordinates, as shown in this image:
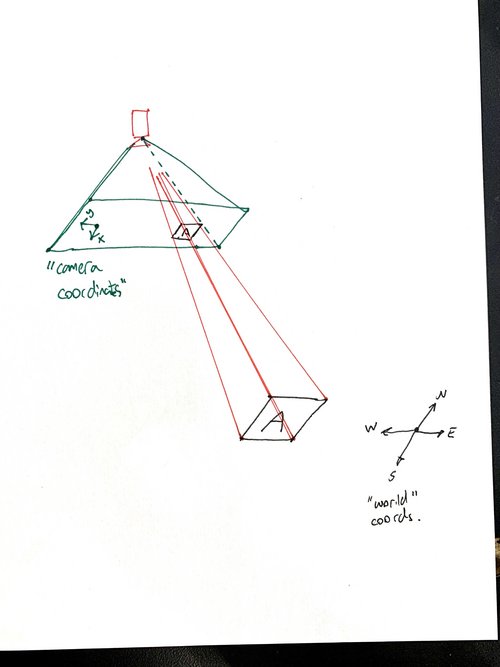
Finding this transformation is related to finding the viewing frustum.
Unfortunately, we will not be able to test your solution until we do an actual flight test with localization.
The text was updated successfully, but these errors were encountered: