2. Parts description
The parts can attached to the robot using a special socket system with clips. For some of the parts required two circular socket space. Part file


Every robot start with a main base (body). You can choose between two available bases. The difference is the height of the bases. For new users suggested the taller one because is more easy to keep in track the wiring inside the robot. Part file


The cover for both of the bases is the same and offers extra space for expandability. The cover secured in the top of the base using special male-female sockets between the base and the cover.

The motors blocks gives to robot the ability to move around to the physical world. The motor block requires two circular space on the base. That part secures in the base using special clips. Part file

The external odometer block can be used for distance , velocity and acceleration calculations. Requires one circular space one the base and one wheel. The wheel should be rotate freely inside the block. Part file

The odometer module can be used for distance , velocity and acceleration calculations. That module can be used for robots with two or four motors. Can be attached to a motor block using a coupler, the coupler connected to the motor shaft from inside the base. The sensor disk should be rotate freely and doesn't be blocks from other parts or wires. Part file

That modules just offers to the robot better contact two the ground and requires two circular socket space. Part file

That modules offers to the robot better contact to the ground and requires two circular socket space. Ca be placed below the robot. Can be used in two wheels robots. Part file

The servo motor block, is very handy 😉 for applications as a robotic arm or in cases you want rotation with precision. The socket of the servo motor block can attached to main body using a spacer ring before the clip and can attached to arm extenders directly using only the clip. Part file

That part used to attach a servo motor block to the base. Part file

The arm extender part, attached to servo motor block using a small Philips screw. The attachment point with the screw is the pivot point for the arm extender. On the other end the part has two circular space slots. On that slots can be placed only servo motor blocks or grip block. You can combine many arm extenders and servo motor blocks but should be careful for the total torque of your servo motor. Part file

The arm rotation base, connects to servo motor block using a small Philips screw. The attachment point with the screw is the pivot point for the that base. That part has two circular space slots and in that slots can be placed only servo motor block. With that part you can achieve rotations in Z axis. Part file

The gripper block is a complex part to assembly with many pieces. That block can be attached to a arm extender part and offers to robot the ability to grips things. Part file

The L shape 2 spaces extender offers extra space to the robot. Can be placed inside on the robot (tall base) or outside. On that part can be attached ultrasonic sensor block, camera block or any other block can be fit. Attached to the base with a male to male connector and requires one circular slot space. Part file

The L shape 4 spaces extender offers extra space to the robot. On that part can be attached ultrasonic sensor block, camera block or any other block can be fit. Attached to the base with a male to male connector and requires one circular slot space. Part file

That part can be uses to connect parts with circular slots eg. L shape extenders. Also can be used to combine multiple bases together for a match larger robot. Part file

The Raspberry Pi is the brain of your robot. Requires one circular socket space. Part file

The motor driver module used to control two dc motors. That part take as input from Raspberry Pi the speed and the direction for every motor. Requires one circular socket space. Part file

The ultrasonic sensor block can detect objects in long distance. Requires one circular socket space. Part file

The IR distance sensor block can detect objects in short distance. Also can be used for line following robots. Requires one circular socket space. Part file

A Nokia 5110 LCD screen block. Useful to print messages to the user. Requires one circular socket space. Part file

A mini breadboard block for experimentation with electronics. Requires one circular socket space. Part file

A micro breadboard block for experimentation with electronics. Requires one circular socket space. Part file
That block contains the original Raspberry Pi camera and can attached to any one space circular socket. Part file

The power block can handle input voltages 9-36V and can output 5v using USB port and terminal output . Part file

That part used to multiply the the power and ground output of the Raspberry PI, also can be used to connect multiple I²C sensors. Part file

Is a custom build battery pack with 3 Li-ion 18650 batteries. The BMS circuit on the pack can charge and discharge the batteries with safety. The output voltage is 12V and input voltage for charging is 12.3V. You can place the battery pack inside the robot base.
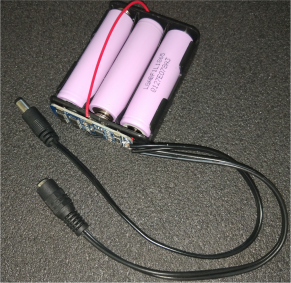
You can attach the battery pack outside of the robot using the battery block. Part file