4. Robot assembly
For every robot you choose the way to connect the electronic parts to Raspberry PI, power supply and the motor driver is the same. Following schematics for the wiring of the parts. Please give extra attention specially to the connection with the power supply.
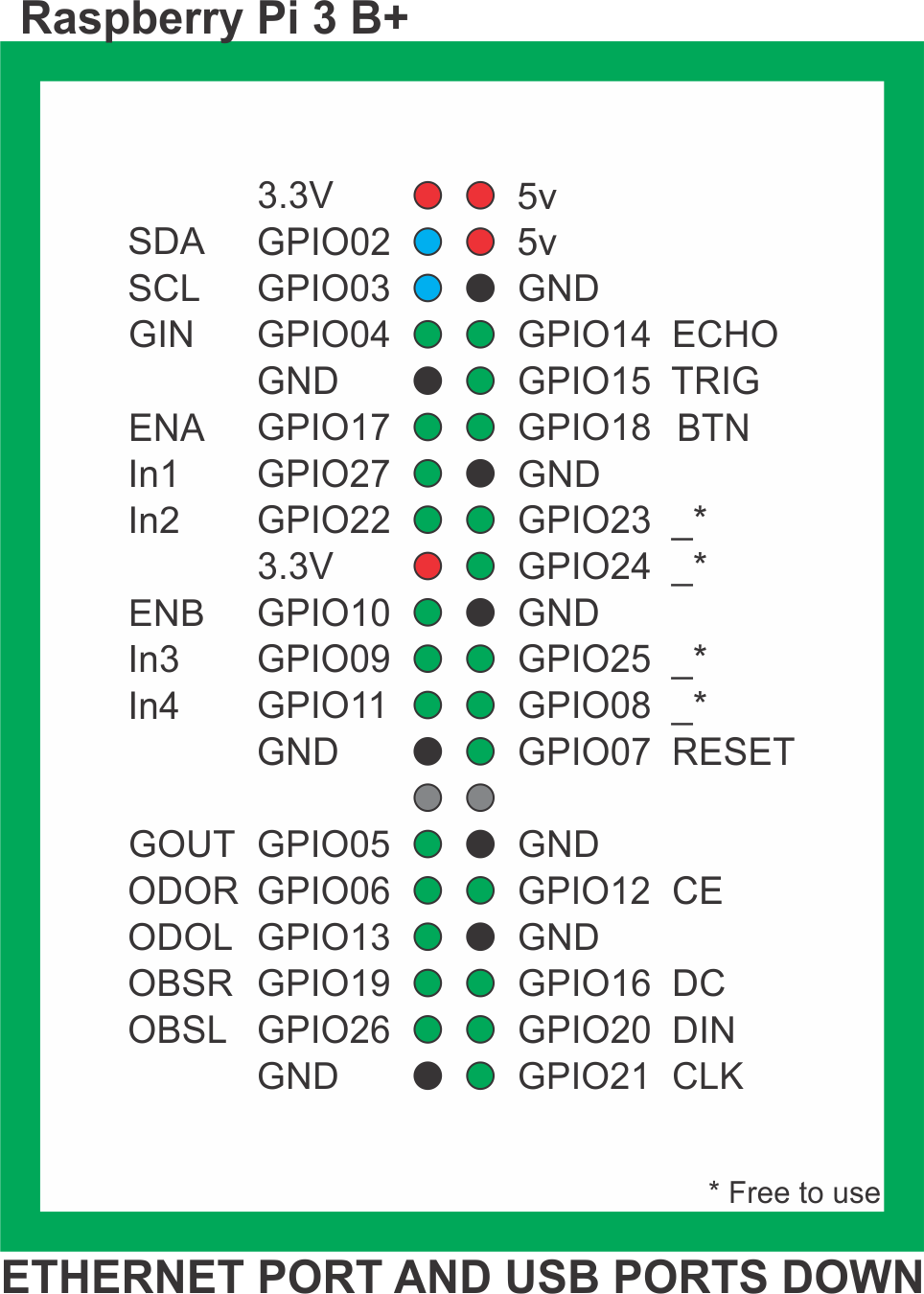
This is a pinout presentation of the Raspberry Pi GPIO pins. On the code use the GPIO number of the pin. Suggested to connect the sensors to same pin with the picture bellow because some of the classes by default uses that pin and don't need further configuration.
SDA,SCL =Accelerometer GIN=General Input ENA,In1,In2,ENB,In3,In4=Motor driver circuit GOUT=General output ODOR=Odometer sensor right ODOL=Odometer sensor left OBSR=IR obstacle sensor right OBSL= IR obstacle sensor left ECHO,TRIG=Ultrasonic sensor RESET,CE,DC,DIN,CLK=Nokia 5110 screen
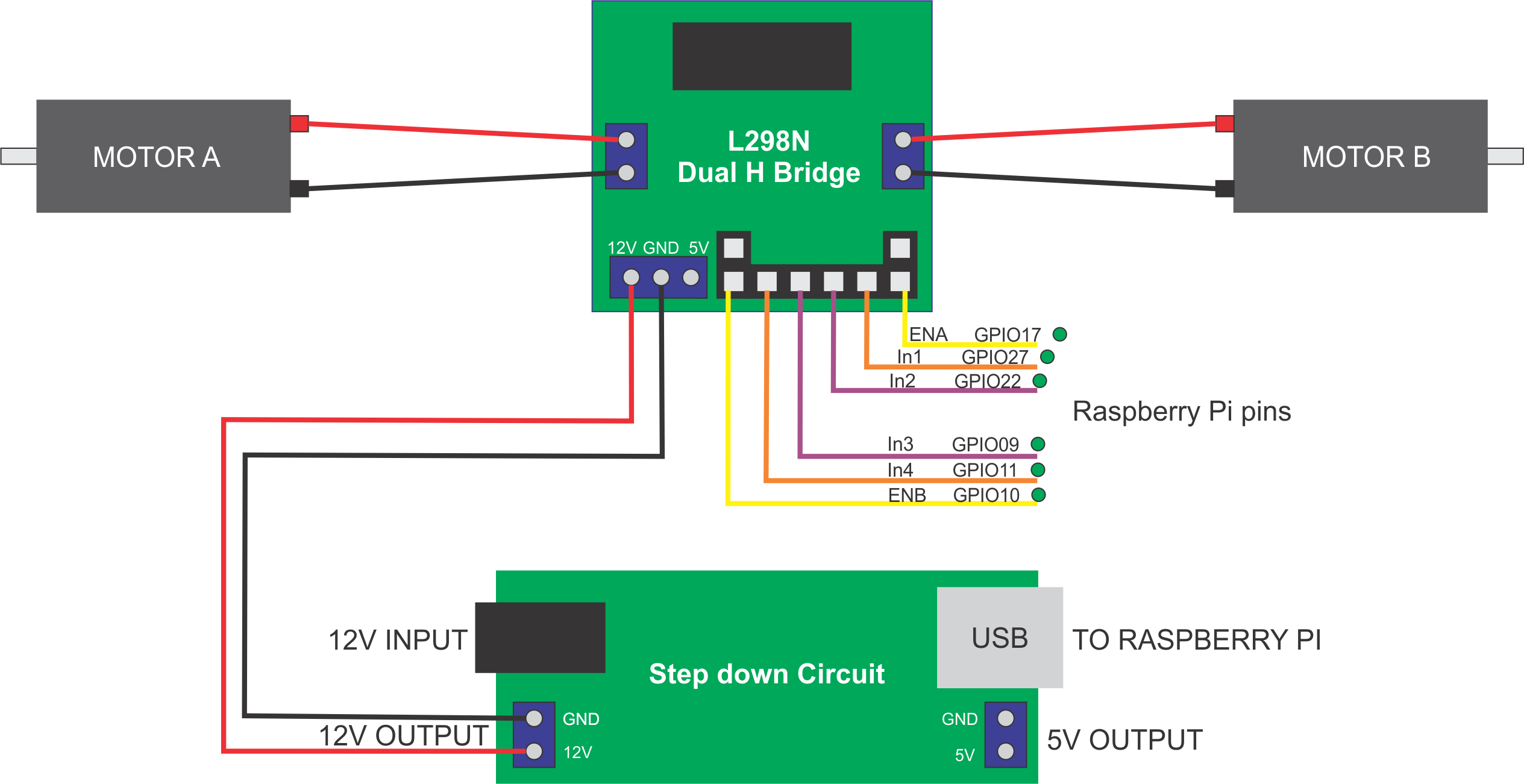
Follow the schematics for motor driver circuit and the power supply wiring to the Raspberry Pi.
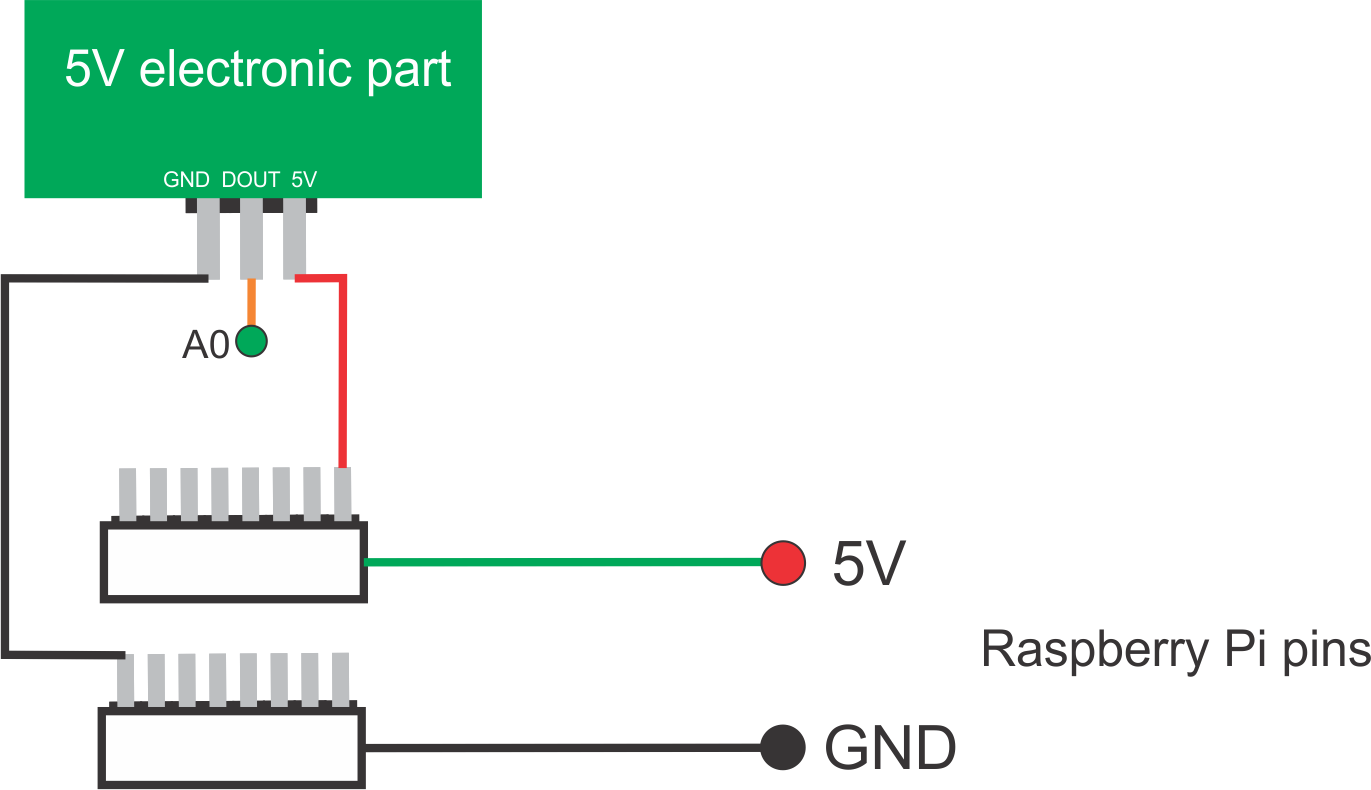
For the robot should be used a bi-directional logic level converter because most of the electronic parts designed to working with 5V and the Raspberry Pi working with 3V. If you have electronic parts with working voltages on 3V and 5V you can connect them directly to Raspberry Pi but you should power them from a 3V pin.
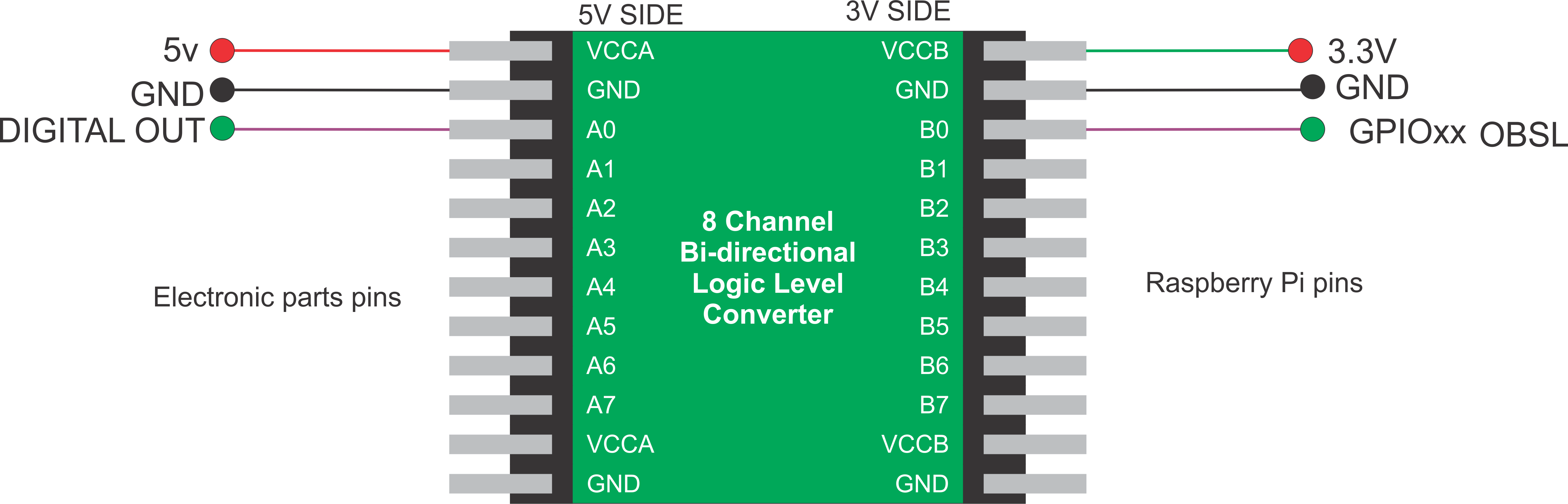
Schematic for the correct way to connect the 5V electronic parts.
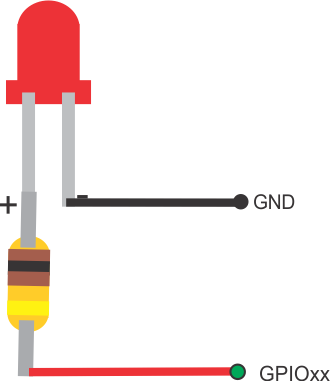
Led connection with 100 ohm resistor
Button connection

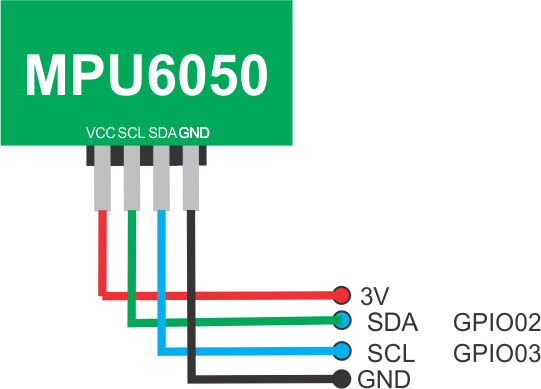
MPU6050 connection
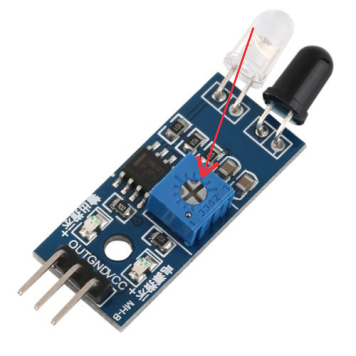
To configure the sensitivity of a digital sensor. For now the proteas_lib supports only digital sensors, but most of the suggested sensors on Part list have a potentiometer. With the Potentiometer you can configure the sensitivity of the sensor using a small screw driver.
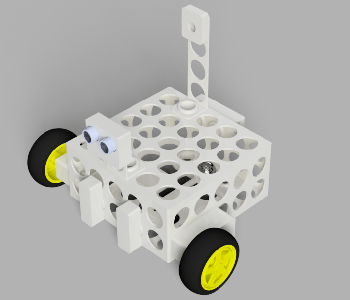
This is a two wheel robot with metal ball caster block. That robot is capable to avoid obstacles, follow line in the floor, computer vision capabilities and measure distance with the inside odometer.
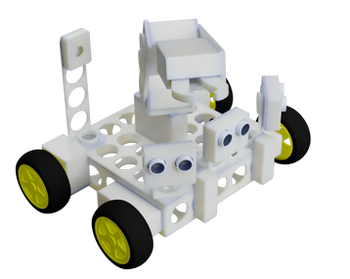
This is a four wheel robot with two external odometers and robotic arm. That robot is capable to avoid obstacles, follow line in the floor, computer vision capabilities,measure distance with the inside odometer and catch light weight things.
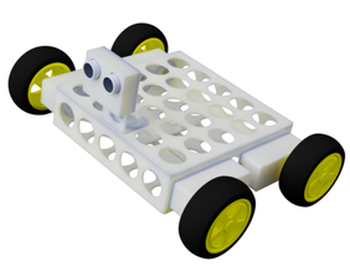
This is a four wheel robot with four motors. That robot is capable to avoid obstacles and have larger torque.
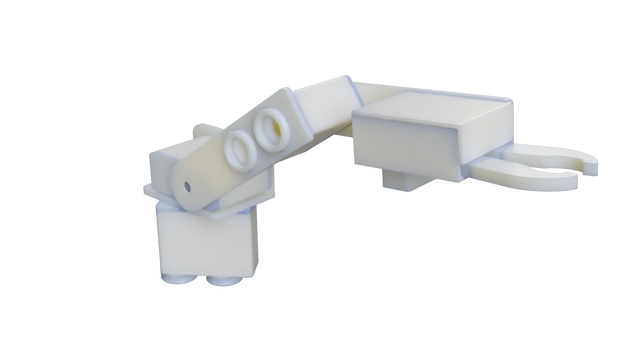
A experimental part. Is a useful robotic arm with capability to catch light weight things, can be combined with the inverse kinematics class.
A cute four leg robot have for robotic arms on legs arrangement.
Not tested yet.