Lateral torque controller: use current desired curvature for PI error #36125
Conversation

6756948 to
d1129a9
Compare
|
Does this only affect ramp up? So constant large desired lateral acceleration requests are mostly unchanged? |
|
Like @sshane mentioned that should be called something else. RawAction is confusing. But actually this also exposes the problem with this, this will mostly just get "observed current curvature" which is different from lag_compensated_curvature lag seconds ago. You really need to do the second one. You'll need to keep a buffer around somewhere, if it can be done cleanly I think it should be done in the controller, and leave modeld unchanged. |
|
4b0161b to
fe76768
Compare
…live delay frames
3344ce6 to
c1cf773
Compare
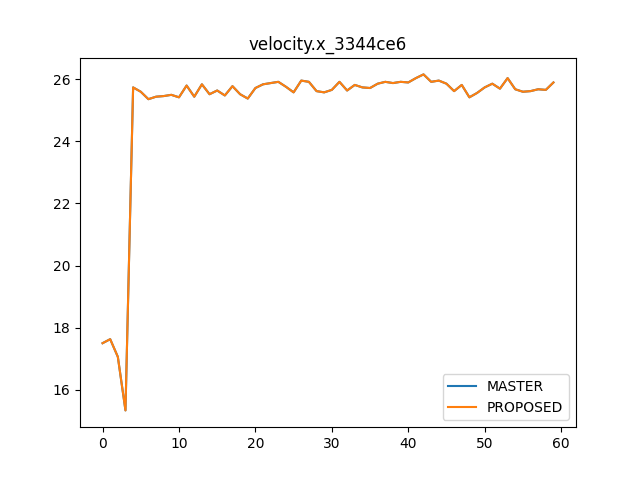
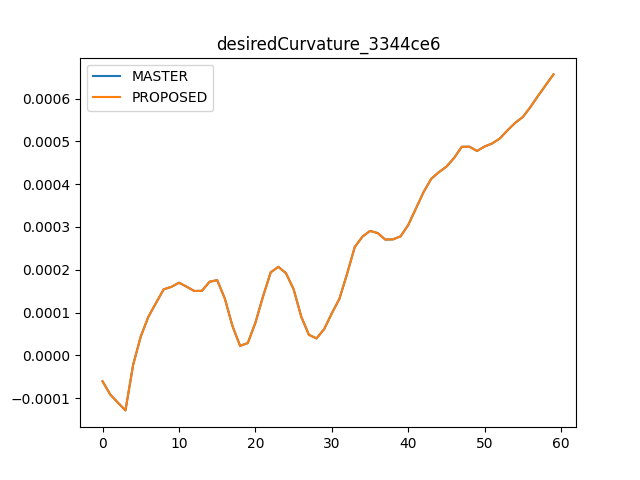
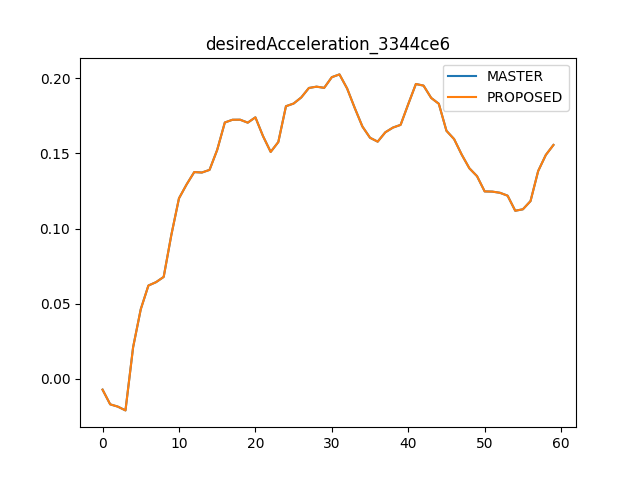
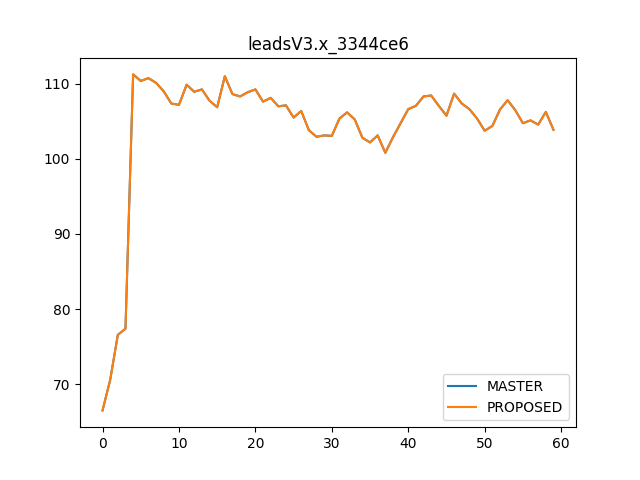
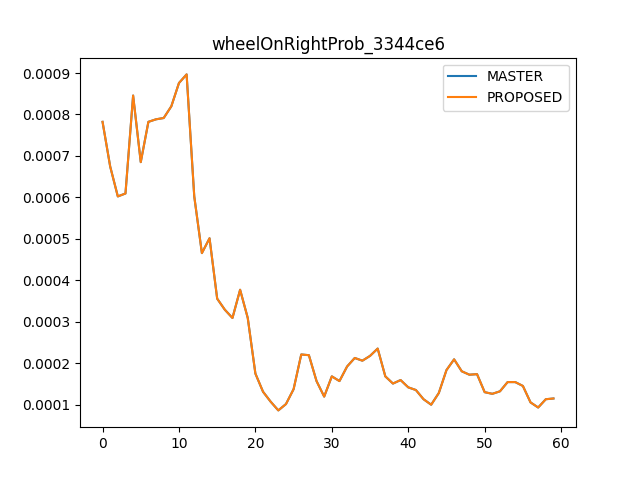
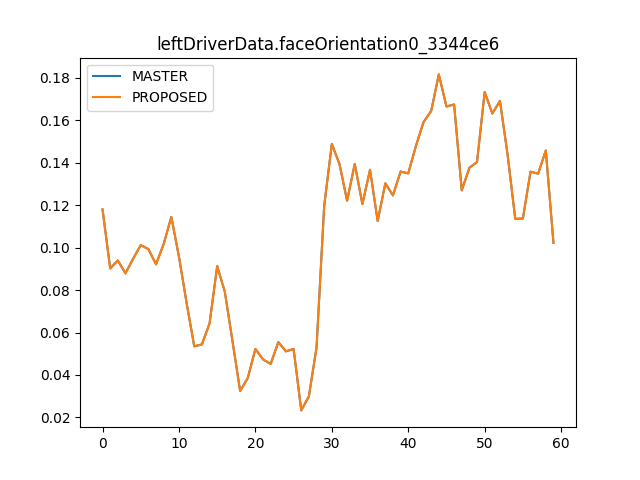
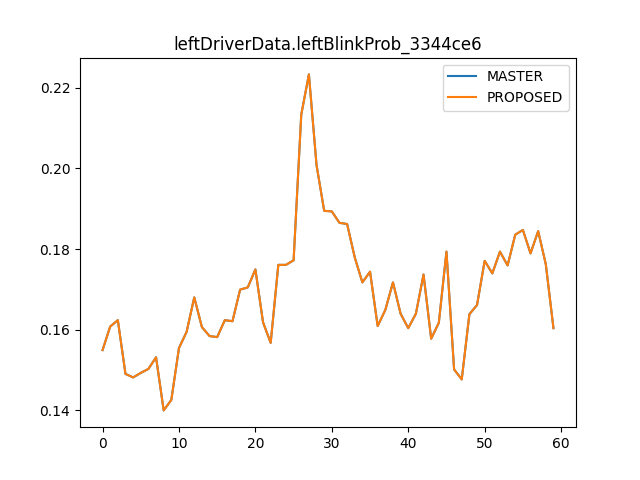
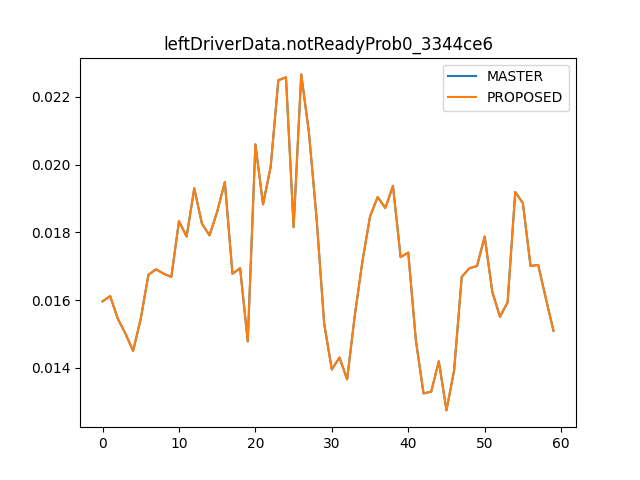
The torque PI controller currently computes its error using the desired lateral acceleration indexed liveDelay frames into the future. When the absolute desired lateral acceleration increases sharply, that step shows up in both the feed-forward term and the error, effectively double-counting the command.
This likely explains the lateral acceleration overshoot observed on some torque-controlled Toyota platforms under large lateral acceleration commands.
I propose computing the PI-controller error and integrated error from the current (raw) desired lateral acceleration instead.